การดึงจุดร่วมหุ่นยนต์กลับคืนมา
ดึงจุดร่วมหุ่นยนต์กลับคืนมาเราต้องทำตามขั้นตอนดังต่อไปนี้:
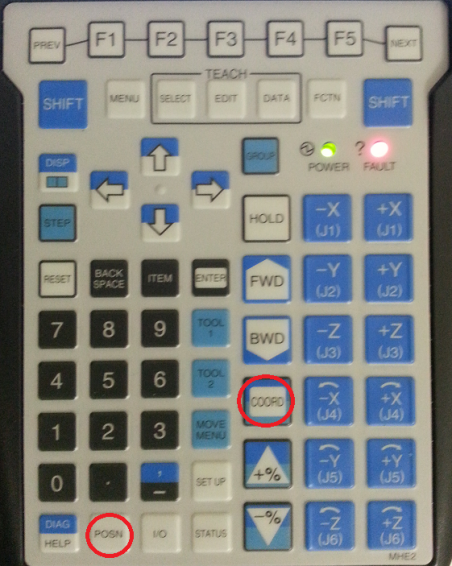
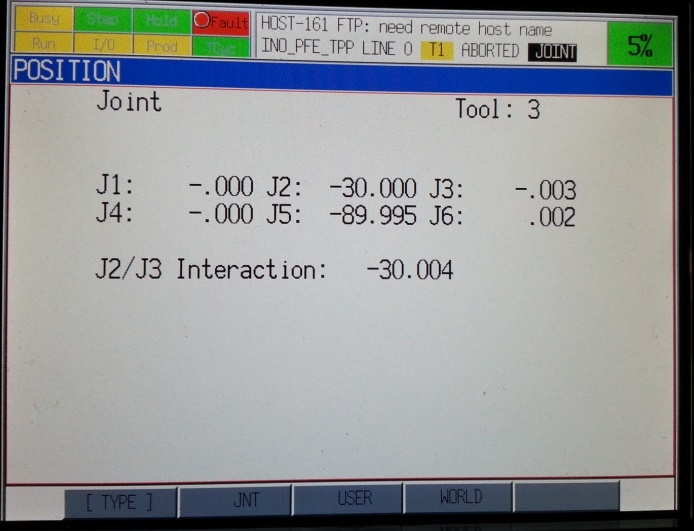
1.เลือกPOSN (ปุ่มในการสอน pendant) เพื่อจะได้เห็นตำแหน่งหุ่นยนต์ล่าสุด
2.เลือกCOORD (ปุ่มในการสอน pendant) เพื่อเลือกโหมดร่วมกัน
ดึงจุดร่วมหุ่นยนต์กลับคืนมาเราต้องทำตามขั้นตอนดังต่อไปนี้:
1.เลือกPOSN (ปุ่มในการสอน pendant) เพื่อจะได้เห็นตำแหน่งหุ่นยนต์ล่าสุด
2.เลือกCOORD (ปุ่มในการสอน pendant) เพื่อเลือกโหมดร่วมกัน