การรวบรวมโปรแกรม (LS vs. TP)
ในส่วนนี้จะอธิบายความแตกต่างระหว่างไฟล์โปรแกรมFanuc LS และ TP ในวิธีการรวบรวมโปรแกรมสำหรับหุ่นยนต์ Fanuc
ไฟล์เลขฐานสองจำเป็นต้องดำเนินการโปรแกรมหุ่นยนต์บนหุ่นยนต์ Fanuc(TP, รู้จักกันในชื่อ TPP) โปรแกรมสำหรับหุ่นยนต์ Fanuc ถูกสร้างขึ้นโดยซอฟต์แวร์การเขียนโปรแกรมออฟไลน์ (เช่นRoboDK) เป็นรูป LS t (ASCII, ข้อความที่สามารถอ่านได้และยังไม่ถูกรวบรวม) มีทั้งหมดสองทางเลือกเพื่อแปลงโปรแกรมหุ่นยนต์ LS เป็นโปรแกรม TP:
1.มีซอฟต์แวร์ASCII Uploadบนหุ่นยนต์ ทางเลือกนี้อาจจะใช้งานได้บนหุ่นยนต์เรียบร้อยแล้ว วิธีที่ดีที่สุดในการตรวจสอบวิธีนี้คือจัดหาไฟล์ LS ไปถึงหุ่นยนต์และควรแปลงไฟล์ TP อย่างอัตโนมัติ ดังตัวอย่าง, วางไฟล์บน disk FR และเลือก “LOAD” บนการสอน pendant
2.รวบรวมโปรแกรมโดยการใช้เครื่องมือ WinOLPC จาก Roboguide ในกรณีนี้, คอมพิวเตอร์เครื่องเดียวกันที่ RoboDK ถูกติดตั้งสามารถรวบรวมโปรแกรม LS อย่างอัตโนมัติโดยการใช้ “maketp.exe” เครื่องมือตัวรวบรวมจาก Fanuc. คำสั่งนี้ต้องการไฟล์ « robot.ini » file. ไฟล์นี้สามารถถูกสร้างด้วยประโยชน์ของsetrobot.exe” จาก WinOLPC ถ้า Roboguide ถูกติดตั้งและสถานที่ทำงานถูกบันทึกบนคอมพิวเตอร์(“เซลล์ทำงาน”)
RoboDK อนุญาตให้รับโปรแกรม TP ที่ถูกต้องอย่างอัตโนมัติหลังจากที่โปรแกรม LS ได้ถูกสร้างขึ้นแล้ว RoboDK บริหารจัดการเครื่องมือ WinOLPC อย่างอัตโนมัติเพื่อที่จะสามารถรวบรวมโปรแกรม LS ASCII ลงในโปรแกรมเลขฐานสอง
ขั้นตอนเหล่านี้ RoboDK ติดตามทันทีหลังจากที่โปรแกรม LS ได้ถูกสร้างขึ้นแล้ว:
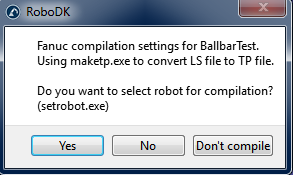
1.หน้าจอดังต่อไปนี้ปรากฏค่าเริ่มต้นหลังจากที่สร้างโปรแกรม LS อีกทั้งสามารถเลือกหุ่นยนต์จาก Roboguide “เซลล์ทำงาน” หรือไม่รวบรวมโปรแกรม ถ้า “ไม่” ถูฏเลือกไฟล์“robot.ini”สุดท้ายจะถูกใช้ถ้าไฟล์ “robot.ini” ไม่เกิดขึ้น, RoboDK จะดำเนินการ “setrobot.exe” อัตโนมัติเพื่อสร้างไฟล์“robot.ini”
2.ปฏิบัติการ “maketp.exe” ถูกใช้เพื่อสร้างโปรแกรมTP
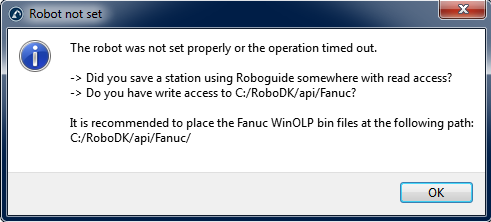
3.หน้าจอต่อไปนี้ปรากฏ ถ้าไฟล์ TP หรือไฟล์“robot.ini” ไม่สามารถถูกสร้างขึ้น ในกรณีนี้, เป็นไปได้ซึ่ง อ่าน/เขียนการเข้าถึงถูกจำกัดไว้ในไฟล์ที่แน่นอน มันควรจะเป็น Roboguide ได้มีการถูกติดตั้งหรือ “เซลล์ทำงาน” ไม่เคยถูกสร้างมาก่อนใน Roboguide
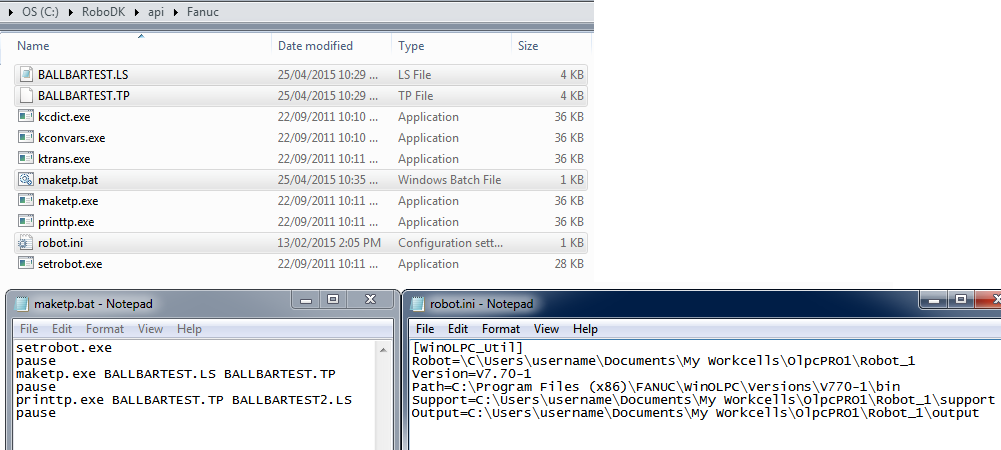
ในกรณีนี้, เนื้อหาบนโฟลเดอร์ดังกล่าวจะต้องถูกคัดลอกจากโฟลเดอร์เริ่มต้น:
C:\Program Files (x86)\FANUC\WinOLPC\bin
ถึงโฟลเดอร์:
C:\RoboDK\api\Fanuc
ตามที่แสดงในรูปถัดมาอนุญาตให้สร้างไฟล์robot.iniในโฟลเดอร์เดียวกันที่ปฏิบัติการ“maketp.exe” ยังคงอยู่ ไฟล์นี้จำเป็นต้องถูกรวบรวมโปรแกรม ซึ่งสำคัญต่อการบันทึก Roboguide « เซลล์ทำงาน » บนโฟลเดอร์ที่อ่านได้โดยผู้ใช้ทั้งหมดซึ่งจะต้องรวบรวมโปรแกรม
เมื่อไฟล์ได้ถูกวางบนโฟลเดอร์ที่ถูกต้องแล้ว, มันจะต้องทดสอบการรวบรวมโดยการSet Fanuc Robot, ตามที่แสดงในรูปถัดไป
(menu: Tools➔Options➔Program)
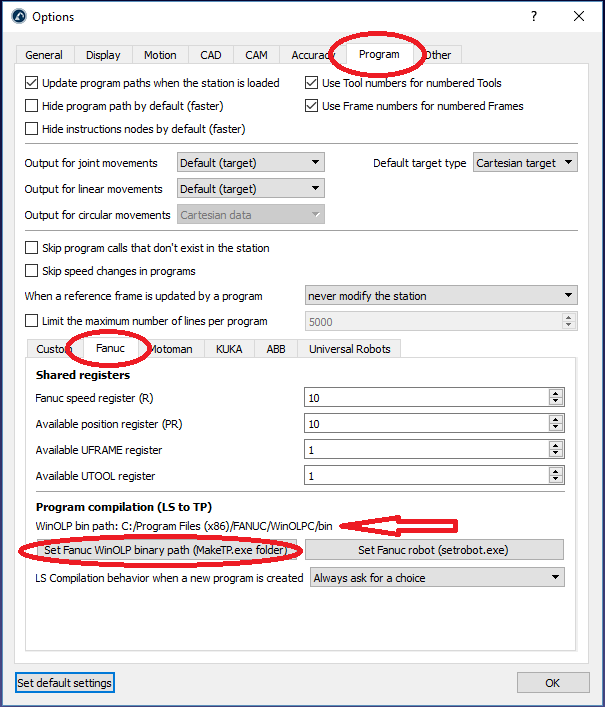
อีกทั้งยังสามารถกำหนดวินโดว์นี้ซึ่งลงทะเบียนจะถูกใช้สร้างโปรแกรมหุ่นยนต์ Fanuc
อีกทางเลือกหนึ่ง,การปรับแต่งหน่วยประมวลผลสามารถถูกใช้ให้ดีขึ้นเพื่อปรับแต่งระบบปฏิบัติทั้งหมดเหล่านี้ สองการปรับแต่งหน่วยประมวลผลซึ่งจัดหามากับแพ็คเกจค่าเริ่มต้น RoboDK สำหรับหุ่นยนต์ Fanuc(ถูกเรียกว่า Fanuc_R30iAและFanuc_RJ3)
https://www.robodk.com/help#PostProcessor.