เคลื่อนย้ายโปรแกรมหุ่นยนต์
เราต้องทำตามขั้นตอนเหล่านี้เพื่อโหลดโปรแกรมจาก USB disk:
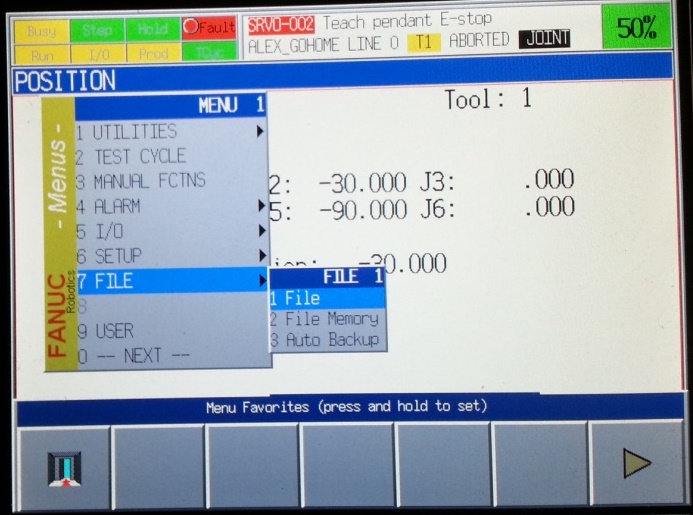
1.เลือกMenu➔File
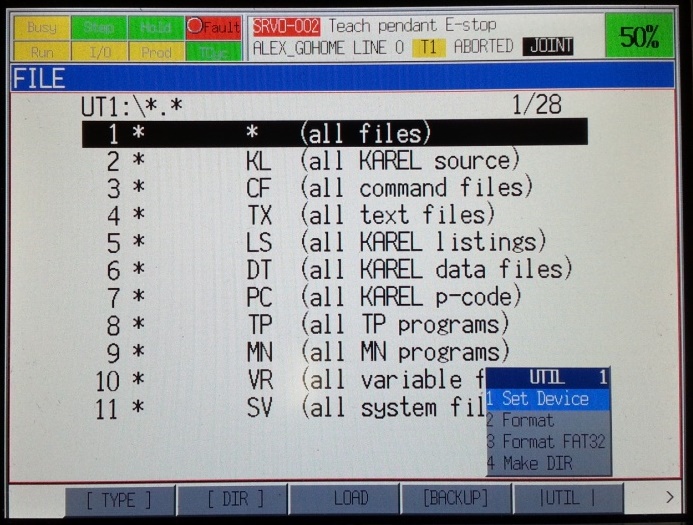
2.เลือกUtilities➔Set device➔USB
3.เลือกDIR
4.เลือกโปรแกรมไฟล์ the TP หรือ LS จาก USB disk (BALLBARTEST.TP สำหรับตัวอย่าง)
มันจะเป็นการบันทึกไฟล์อย่างอัตโนมัติสำหรับหน่วยความจำFRของตัวควบคุม
5.เลือกโปรแกรมในหน่วยความจำFRและเลือก LOAD (ปุ่มหน้าจอ)
สำคัญ: ASCII Upload จำเป็นสำหรับการเขียนโปรแกรมออฟไลน์ เป็นการอนุญาตให้โหลดไฟล์ LS โดยตรงจากหุ่นยนต์มีอีกทางเลือกหนึ่ง, โปรแกรม LS (ไฟล์ASCII) สามารถถูกใช้งานผ่านโปรแกรม TP (ไฟล์เลขฐานสอง) จาก PC โดยการใช้เครื่องมือ Fanuc’s WinOLPC (MakeTP)
สำคัญ: สำหรับความเร็วเส้นตรงของโปรแกรมถูกสร้างขึ้นโดย RoboDK กำหนดโดยการลงทะเบียน R[10] โดยค่าเริ่มต้น ความเร็วจะไม่ถูกตั้งค่าในโปรแกรมซึ่งจะถูกตั้งค่าเอง ในกรณีนั้น:
เลือก: DATA➔Type➔Register, R[10]=50 (สำหรับความเร็ว 50 mm/s)