การดึงจุดร่วมหุ่นยนต์กลับคืนมา
ตามขั้นตอนเหล่านี้เพื่ออนุญาตดึงจุดร่วมหุ่นยนต์กลับคืนมา:
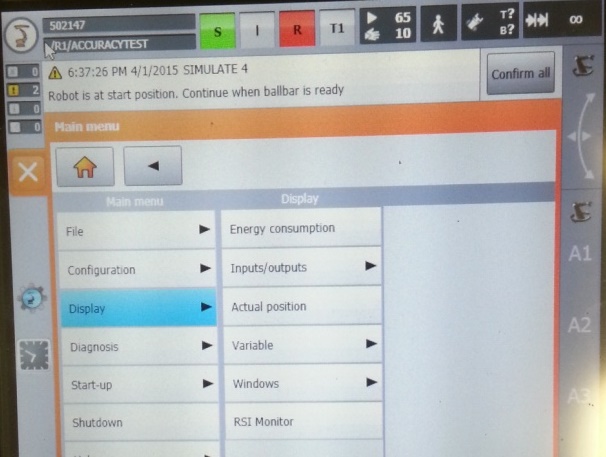
1.เลือกMENU➔Display➔Actual position
2.เลือกโหมดJointsและใช้คอลัมน์ซ้ายเพื่อนำจุดร่วมหุ่นยนต์
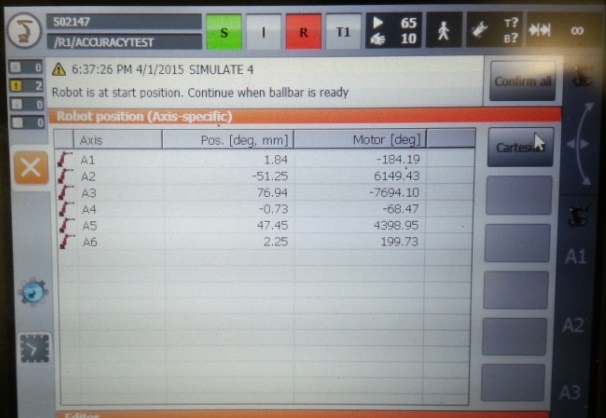
เคล็ดลับ: มันเป็นไปได้ที่จะนำจุดร่วมหุ่นยนต์กลับคืนมาอย่างแม่นยำIt is possible to retrieve the robot joints more accurately (5 ทศนิยมความแม่นำ) โดยการแสดงผลตัวแปร $AXIS_ACT ซึ่งใช้ไดร์เวอร์หุ่นยนต์ the RoboDK โดยง่ายสำหรับ KUKA และการเลือกปุ่มGet robot joints