การนำ TCP คืนกลับมา
ตามขั้นตอนเพื่ออนุญาตให้สร้างหรือดัดแปลงเครื่องมือหุ่นยนต์ (TCP, รู้จักกันในชื่อ$BASEในการเขียนโปรแกรมหุ่นยนต์KUKA KRC):
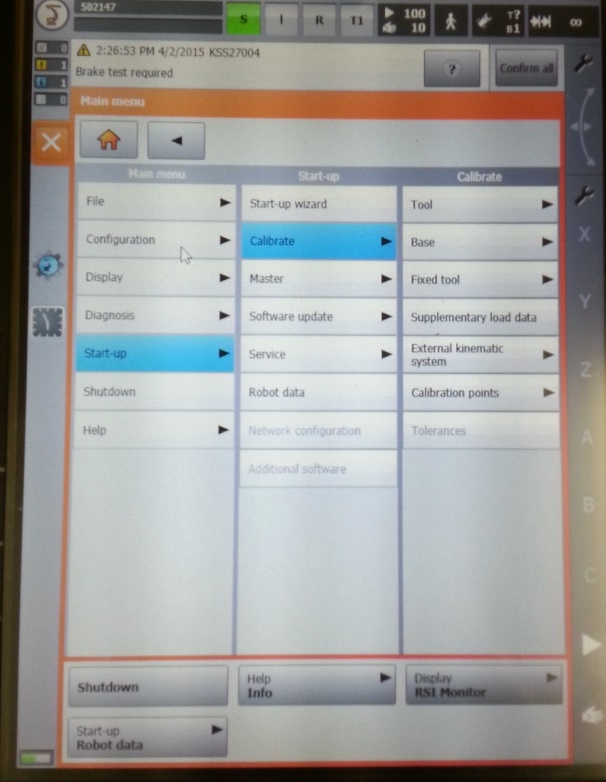
1.เลือกMENU➔Start-up➔Calibrate➔Tool
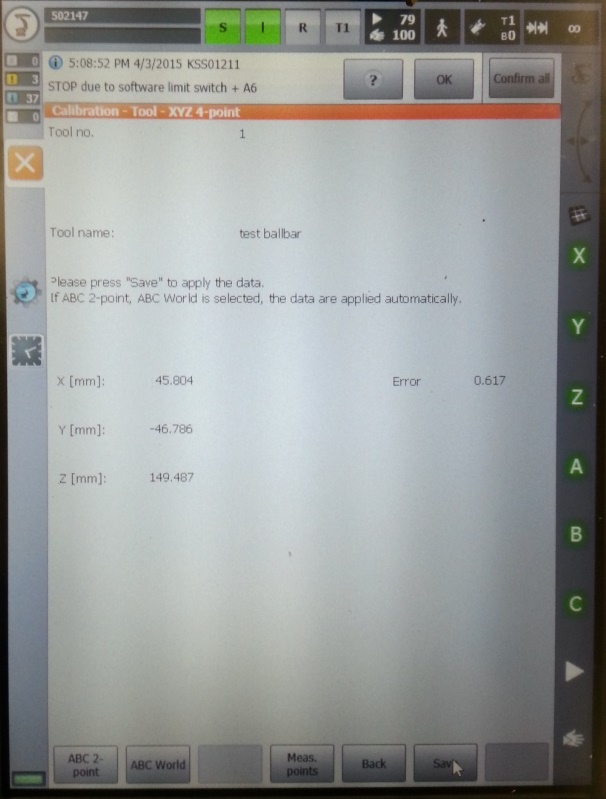
2.เลือกเครื่องมือและแก้ไขหรือทดสอบตำแหน่งX,Y,Z ของ TCP
ตามขั้นตอนเพื่ออนุญาตให้สร้างหรือดัดแปลงเครื่องมือหุ่นยนต์ (TCP, รู้จักกันในชื่อ$BASEในการเขียนโปรแกรมหุ่นยนต์KUKA KRC):
1.เลือกMENU➔Start-up➔Calibrate➔Tool
2.เลือกเครื่องมือและแก้ไขหรือทดสอบตำแหน่งX,Y,Z ของ TCP