หุ่นยนต์ Motoman
หุ่นยนต์ Motoman ต้องการหน่วยการวัดต่อองศาของแต่ละ joint เพื่อแปลงค่าหน่วยการวัด joint เพื่อค่าเชิงมุมและในทางกลับกัน RoboDK ทำการแปลงอัตโนมัติ ถ้าข้อมูลนี้ถูกหาได้ด้วยค่าพารามิเตอร์หุ่นยนต์ เพื่อทำให้เฉพาะถ้าข้อมูลนี้ถูกจัดหาหรืออัพเดท:
1.ดับเบิ้ลคลิกหุ่นยนต์ใน RoboDK
2.เลือกParameters
3.เลือก Unlock advanced options
4.ทบทวนหรืออัพเดทค่าหน่วยการวัด/องศาของแต่ละ joint
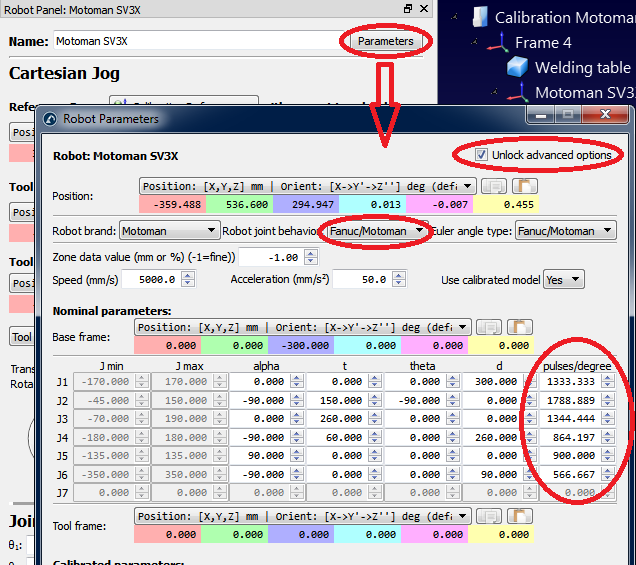
อีกทั้ง,ยังสำคัญที่จะจดบันทึกหุ่นยนต์ Motoman ที่มีการจับคู่กันระหว่าง 2 และ 3joint นั้นหมายความว่าจุดร่วม 3 จุดเลื่อนย้ายเมื่อ จุดร่วมที่ 2 ถูกย้าย ในกรณีนี้, ข้อมูลRobot joint behavior จะต้องถูกตั้งค่าเป็น Fanuc/Motoman