ดำเนินการโปรแกรมจาก PC
ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์(ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนไปยังหุ่นยนต์และใช้งาน). ด้วยไดร์เวอร์หุ่นยนต์, เพื่อที่จะดำเนินการแบบจำลองโดยตรงจากหุ่นยนต์(การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วน Robot Drivers
โปรแกรมหุ่นยนต์สามารถถูกดำเนินการโดยตรงจาก RoboDK ถึงหุ่นยนต์ถ้าการเชื่อมต่อเครือข่ายได้ถูกจัดตั้งขึ้นแล้ว
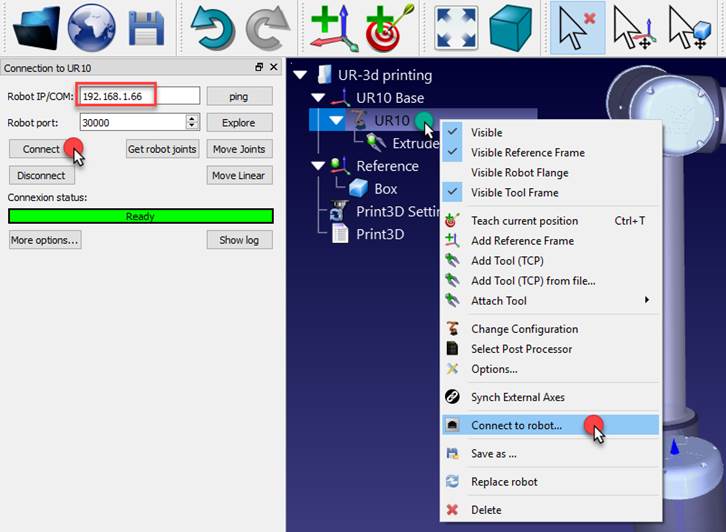
1.คลิกขวาที่หุ่นยนต์ในRoboDK
2.เลือก: 
3.ป้อนค่า IP ของหุ่นยนต์
4.เลือกConnect.
นั้นควรจะมีข้อความสีเขียวแสดงว่าReadyถ้าการเชื่อมต่อสำเร็จแล้ว
หุ่นยนต์สามารถถูกเคลื่อนย้ายโดยการเลือกGet robot joints, Move Joints และMove Linear,จากเมนูการเชื่อมต่อ
มีทั้งหมดสองวิธีที่แตกต่างกันเพื่อดำเนินโปรแกรมจาก PC ต่อ robot:
1.Run on robotเป็นขั้นเป็นตอนด้วยข้อเสนอแนะในRoboDK (การเขียนโปรแกรมออนไลน์):
วิธีนี้ใช้หุ่นยนต์เป็นเซิร์ฟเวอร์และแต่ละคำแนะนำถูกส่งไปที่หุ่นยนต์เป็นขั้นเป็นตอนเหมือนกับที่ปฏิบัติในแบบจำลอง วิธีนี้เป็นประโยชน์สำหรับการแก้ไขจุดบกพร่อง
a.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
b.เลือกRun on robot (F6)
c.ดับเบิ้ลคลิกที่โปรแกรมและเลือก (หรือคลิกขวาและเลือก Run)
เมื่อทางเลือกนี้ถูกตรวจสอบ มันจะเชื่อมต่อหุ่นยนต์จริงในทุกเวลา เราดับเบิ้ลคลิกโปรแกรม (หรือคลิกขวา, จากนั้น, เลือกRun)
ระบบปฏิบัติการเหล่านี้สามารถดูได้จาก API และอนุญาตให้รวม RoboDK ลงในแอพพลิเคชั่นอื่น API ใช้งานได้ใน Python และ C#
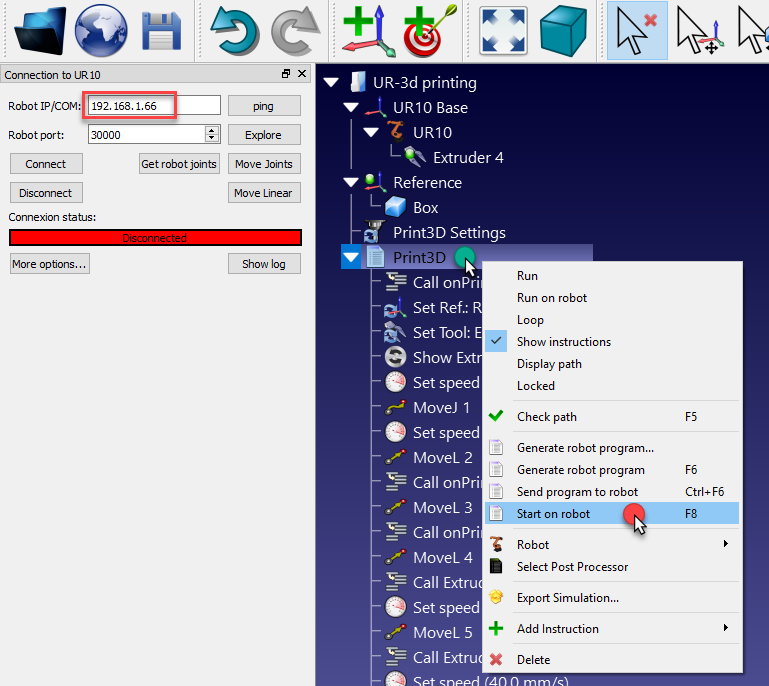
2.Start on robotสร้างโปรแกรมที่เสร็จสมบูรณ์, ถ่ายโอนไปยังหุ่นยนต์และเริ่มต้นโปรแกรมบนหุ่นยนต์จริง(การเขียนโปรแกรมหุ่นยนต์ออฟไลน์):
a.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
b.เลือกStart on robot (F8)