ดำเนินการโปรแกรมบนตัวควบคุม UR
เมื่อโปรแกรมได้พร้อมแล้วใน RoboDK อีกทั้งยังสามารถสร้างต้นฉบับ และ/หรือโปรแกรม URP มีทั้งหมดสองไฟล์สามารถถูกปฏิบัติการโดยหุ่นยนต์ควบคุม ตามที่เห็นในขั้นตอนเหล่านี้เพื่อการสร้างต้นฉบับและโปรแกรมURP จากการจำลอง RoboDK:
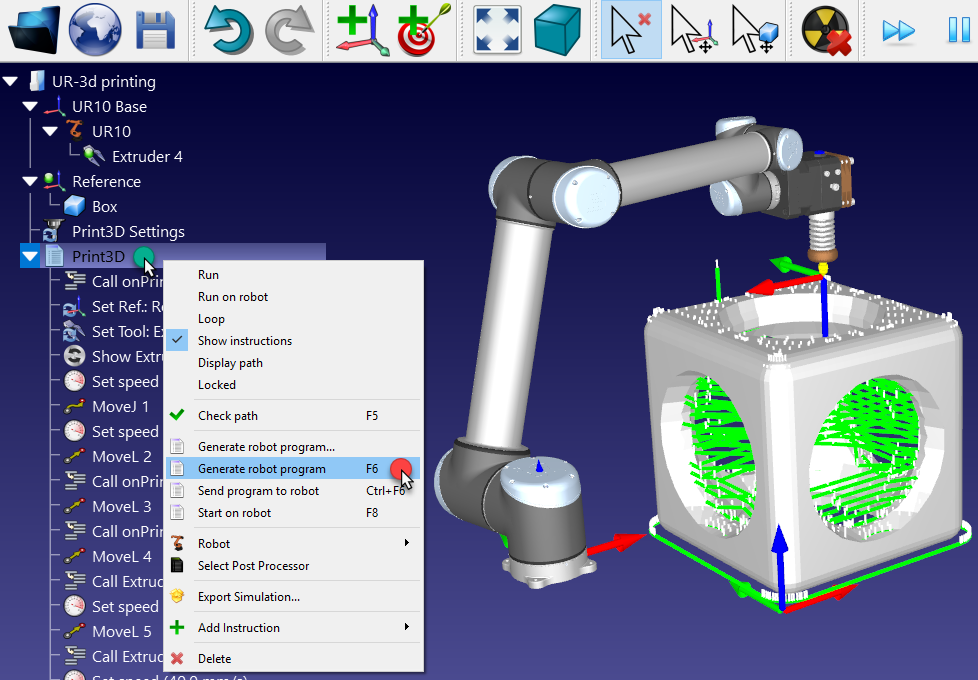
1.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
2.เลือกGenerate robot program F6
หลังจากการสร้างโปรแกรมเสร็จสมบูรณ์แล้ว, โปรแกรมจะถูกแสดงผลบนตัวแก้ไขข้อความ พฤติกรรมนี้สามารถถูกเปลี่ยนในเมนู : Tools➔Options➔Other
การถ่ายโอนต้นฉบับและไฟล์ URP สามารถทำให้เสร็จสิ้นผ่านการถ่ายโอน FTP หรือไดร์ USB
ตามรูปต่อไปนี้และขั้นตอนสรูปขั้นตอนเพื่อการสร้างโปรแกรมต้นฉบับบนหุ่นยนต์:
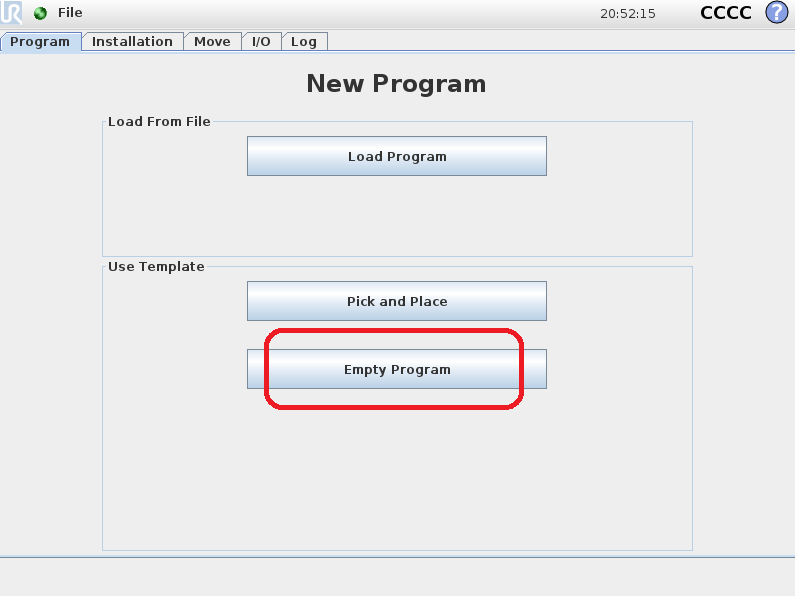
1.เลือกProgram Robotบนหน้าจอหลักของการสอน pendant
2.เลือกEmpty Program
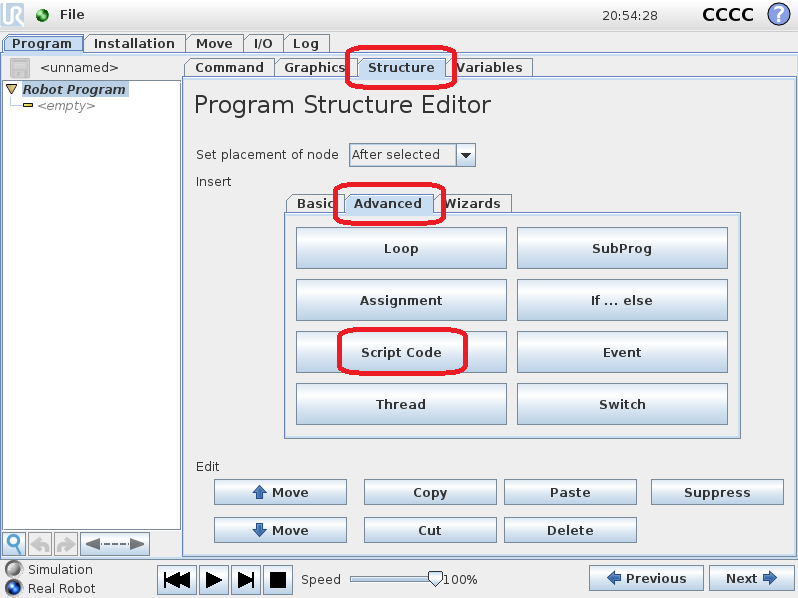
3.เลือกแถบ Structure
4.เลือกแถบAdvanced
5.เลือกScript code
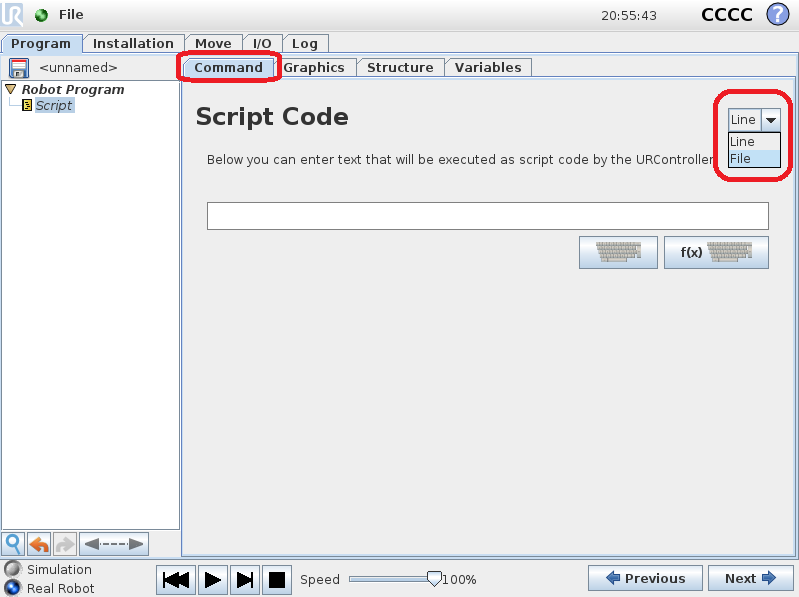
6.เลือกFile (ซึ่งถูกแสดงในรูปภาพ)
7.เลือกไฟล์ต้นฉบับที่ถูกสร้างด้วย RoboDK
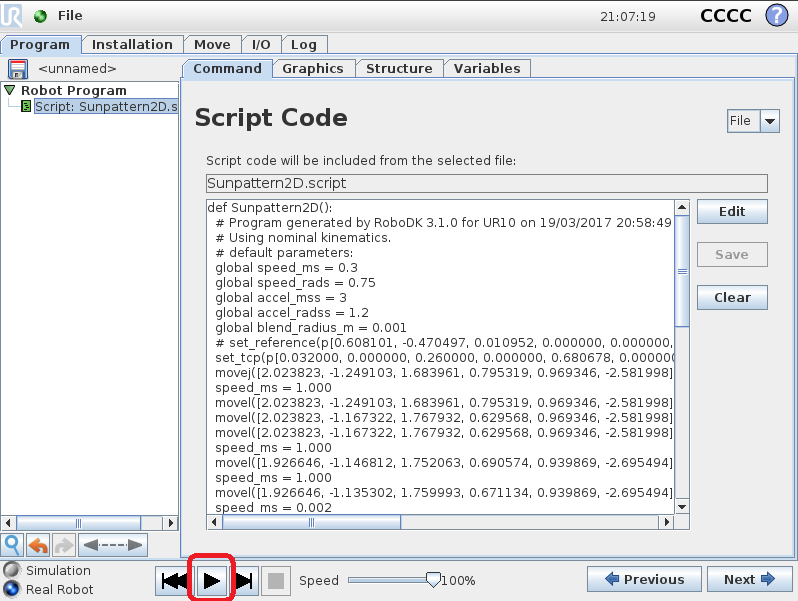
8.เลือกไอคอนการเล่นเพื่อดำเนินการโปรแกรม
9.Select File➔Save เพื่อบันทึกการเปลี่ยนแปลง
10.สุดท้าย, โปรแกรมจะถูกสร้างขึ้น