หุ่นยนต์ Universal
หุ่นยนต์ Universal (UR) สามารกถูกเขียนได้โดย RoboDK โดยการใช้สองวิธีการที่แตกต่างกัน:
1.Graphical User-Interface Level (ไฟล์ URP):
โปรแกรม URP ถูกสร้างขึ้นผ่านการสอนผ่านหน้าจอสัมผัสของ pendant ของหุ่นยนต์โปรแกรม URP สามารถมีต้นฉบับหนึ่งหรือมากกว่าเป็นโปรแกรมย่อย โปรแกรมURP ถูกแปลงลงในโปรแกรมต้นฉบับข้างหลังหน้าจอบนหุ่นยนต์ควบคุมก่อนการปฏิบัติการ
2.Script Level (ไฟล์ SCRIPT):
โปรแกรมต้นฉบับใช้ภาษาการเขียนโปรแกรมต้นฉบับUR เหมือนกับภาษาการเขียนโปรแกรม ต้นฉบับ UR มีคัวแปร, ชนิด, กระแสของสถานะการควบคุม, ฟังก์ชั่นและอื่นๆนอกจากนี้, ต้นฉบับ UR Script มีตัวแปรที่ถูกสร้างภายในและฟังก์ชั่นที่ควบคุม I/O และการเคลื่อนที่ของหุ่นยนต์
RoboDK เป็นตัวจำลองและซอฟต์แวร์การเขียนโปรแกรมออฟไลน์สำหรับหุ่นยนต์อุตสาหกรรม RoboDK สามารถสร้างต้นฉบับและไฟล์ URP ซึ่งสามารถถูกปฏิบัติการโดยหุ่นยนต์ URโดยนอกจากนี้, เป็นไปได้ที่จะexecute programs on the robot จาก RoboDK ถ้าหุ่นยนต์ได้ถูกเชื่อมต่อกับคอมพิวเตอร์
RoboDK สามารถนำเข้าไฟล์ต้นฉบับเป็นตัวจำลอง และจำลองโปรแกรมต้นฉบับที่มีอยู่, ดัดแปลงและส่งออกใหม่อีกครั้ง
การสอนpendant ใช้ภาพเป็นตัวประสานกับผู้ใช้ของ ถูกเรียกว่า PolyScope (ซึ่งแสดงในรูปถัดไป) อ้างอิงกับURScript Programming Languageด้วยตนเองสำหรับข้อมูลเพิ่มเติม
การนำ IP หุ่นยนต์ UR กลับมา
IP ของหุ่นยนต์จำเป็นที่ต้องดำเนินการผ่านโปรแกรมโดยตรงจากตัวจำลอง RoboDK อีกทั้งยังสามารถถ่ายโอนโปรแกรมไฟล์ผ่าน FTP
IP ของหุ่นยนต์สามารำถูกนำมากลับมาได้จากเมนูAboutในหน้าจอหลักการสอน UR
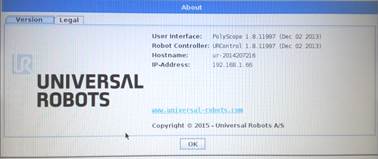
หุ่นยนต์จะต้องถูกเชื่อมต่อกับคอมพิวเตอร์ผ่านการเชื่อมต่อ Ethernet (เชื่อมต่อโดยตรงหรือผ่านเครือข่าย) การทดสอบPing อนุญาตให้ทดสอบถ้าการเชื่อมเครือข่ายได้ถูกติดตั้งอย่างเหมาะสม
ดำเนินการโปรแกรมจาก PC
ไดร์เวอร์หุ่นยนต์มีทางเลือกสำหรับการเขียนโปรแกรมออฟไลน์(ซึ่งโปรแกรมได้ถูกสร้างขึ้น, จากนั้น, ถ่ายโอนไปยังหุ่นยนต์และใช้งาน). ด้วยไดร์เวอร์หุ่นยนต์, เพื่อที่จะดำเนินการแบบจำลองโดยตรงจากหุ่นยนต์(การเขียนโปรแกรมออนไลน์) ข้อมูลเพิ่มเติมดูได้ในส่วน Robot Drivers
โปรแกรมหุ่นยนต์สามารถถูกดำเนินการโดยตรงจาก RoboDK ถึงหุ่นยนต์ถ้าการเชื่อมต่อเครือข่ายได้ถูกจัดตั้งขึ้นแล้ว
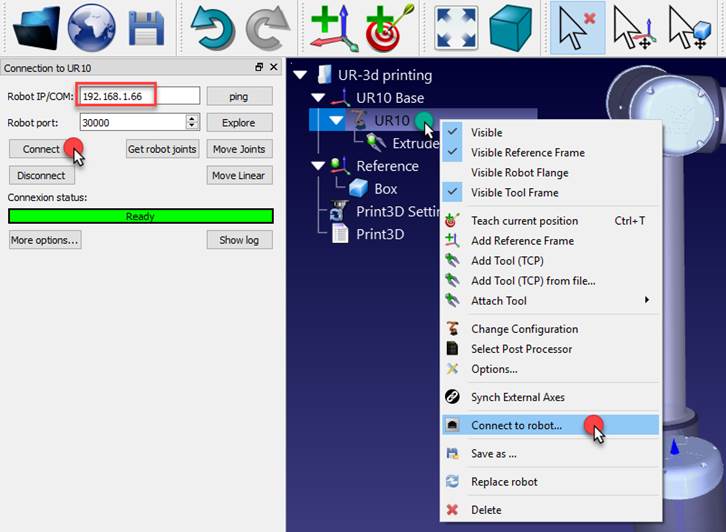
1.คลิกขวาที่หุ่นยนต์ในRoboDK
2.เลือก: 
3.ป้อนค่า IP ของหุ่นยนต์
4.เลือกConnect.
นั้นควรจะมีข้อความสีเขียวแสดงว่าReadyถ้าการเชื่อมต่อสำเร็จแล้ว
หุ่นยนต์สามารถถูกเคลื่อนย้ายโดยการเลือกGet robot joints, Move Joints และMove Linear,จากเมนูการเชื่อมต่อ
มีทั้งหมดสองวิธีที่แตกต่างกันเพื่อดำเนินโปรแกรมจาก PC ต่อ robot:
1.Run on robotเป็นขั้นเป็นตอนด้วยข้อเสนอแนะในRoboDK (การเขียนโปรแกรมออนไลน์):
วิธีนี้ใช้หุ่นยนต์เป็นเซิร์ฟเวอร์และแต่ละคำแนะนำถูกส่งไปที่หุ่นยนต์เป็นขั้นเป็นตอนเหมือนกับที่ปฏิบัติในแบบจำลอง วิธีนี้เป็นประโยชน์สำหรับการแก้ไขจุดบกพร่อง
a.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
b.เลือกRun on robot (F6)
c.ดับเบิ้ลคลิกที่โปรแกรมและเลือก (หรือคลิกขวาและเลือก Run)
เมื่อทางเลือกนี้ถูกตรวจสอบ มันจะเชื่อมต่อหุ่นยนต์จริงในทุกเวลา เราดับเบิ้ลคลิกโปรแกรม (หรือคลิกขวา, จากนั้น, เลือกRun)
ระบบปฏิบัติการเหล่านี้สามารถดูได้จาก API และอนุญาตให้รวม RoboDK ลงในแอพพลิเคชั่นอื่น API ใช้งานได้ใน Python และ C#
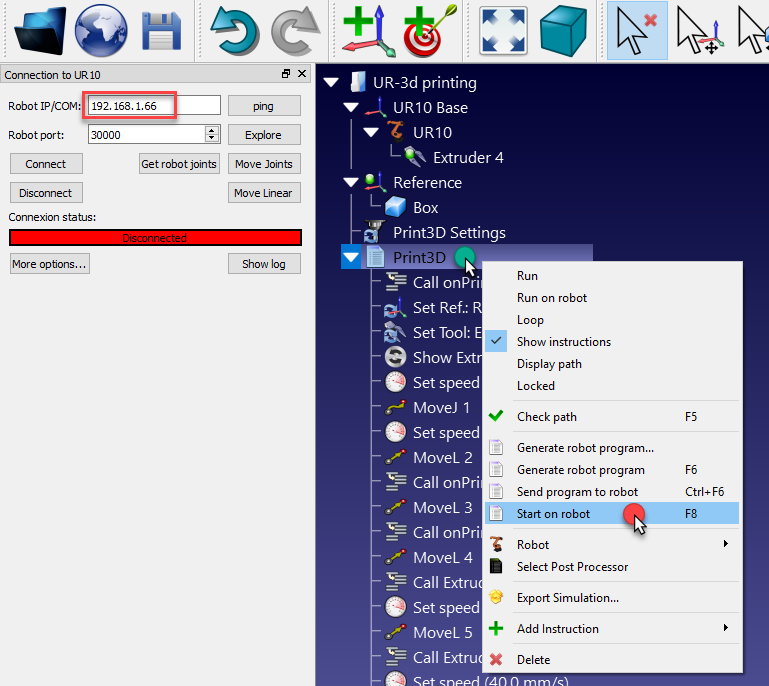
2.Start on robotสร้างโปรแกรมที่เสร็จสมบูรณ์, ถ่ายโอนไปยังหุ่นยนต์และเริ่มต้นโปรแกรมบนหุ่นยนต์จริง(การเขียนโปรแกรมหุ่นยนต์ออฟไลน์):
a.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
b.เลือกStart on robot (F8)
การแสดงผล UR
มี macro ที่สามารถใช้งานได้ในคลังซึ่งอนุญาตให้แสดงผลสถานะของหุ่นยนต์ UR เลือก:
1.เลือกFile➔Open
2.โหลด Macro UR_ActivateMonitoring.py จาก: C:/RoboDK/Library/Macros/. วัตถุ Python จะถูกเพิ่มในฐาน
3.ทำให้แน่ใจว่า IP ของหุ่นยนต์ได้ถูกจัดหาอย่างเหมาะสมแล้วในค่าพารามิเตอร์เชื่อมต่อหุ่นยนต์
4.ดับเบิ้ลคลิกที่ macro เพื่อเริ่มต้นการแสดงผล
แบบจำลองนี้จะอัพเดทตำแหน่งของหุ่นยนต์และจะสร้างเป้าหมายเหมือนหุ่นยนต์จริงที่ถูกเคลื่อนย้าย ระหว่างสิ่งอื่น, เป็นไปได้ที่จะแสดงผลความเร็วหุ่นยนต์, ความเร่งและมอเตอร์ล่าสุด
ดำเนินการโปรแกรมบนตัวควบคุม UR
เมื่อโปรแกรมได้พร้อมแล้วใน RoboDK อีกทั้งยังสามารถสร้างต้นฉบับ และ/หรือโปรแกรม URP มีทั้งหมดสองไฟล์สามารถถูกปฏิบัติการโดยหุ่นยนต์ควบคุม ตามที่เห็นในขั้นตอนเหล่านี้เพื่อการสร้างต้นฉบับและโปรแกรมURP จากการจำลอง RoboDK:
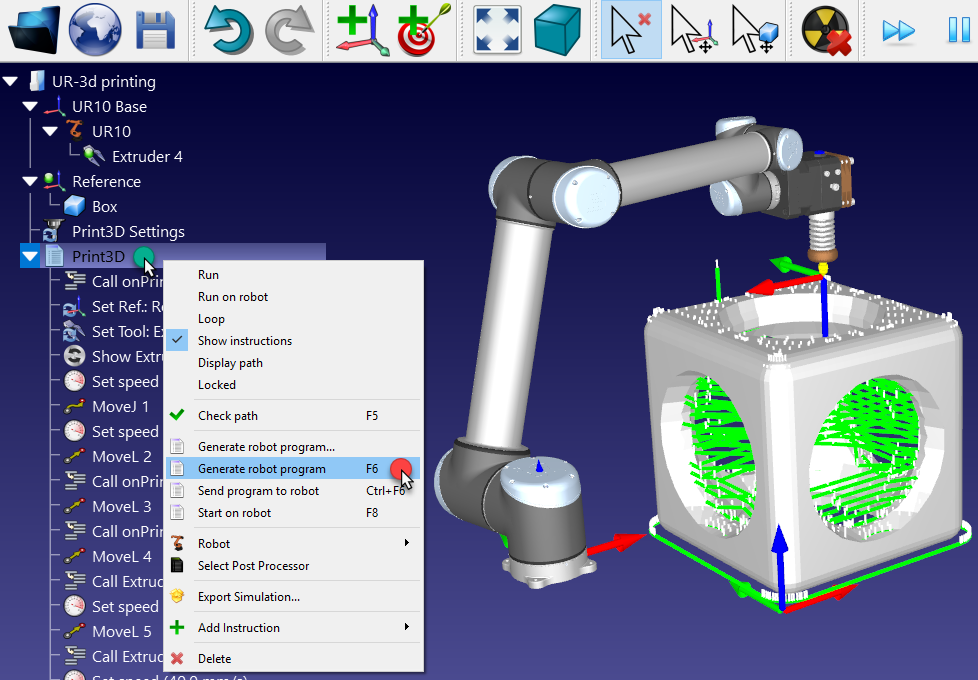
1.คลิกขวาที่โปรแกรม (พิมพ์ 3 มิติในตัวอย่างนี้)
2.เลือกGenerate robot program F6
หลังจากการสร้างโปรแกรมเสร็จสมบูรณ์แล้ว, โปรแกรมจะถูกแสดงผลบนตัวแก้ไขข้อความ พฤติกรรมนี้สามารถถูกเปลี่ยนในเมนู : Tools➔Options➔Other
การถ่ายโอนต้นฉบับและไฟล์ URP สามารถทำให้เสร็จสิ้นผ่านการถ่ายโอน FTP หรือไดร์ USB
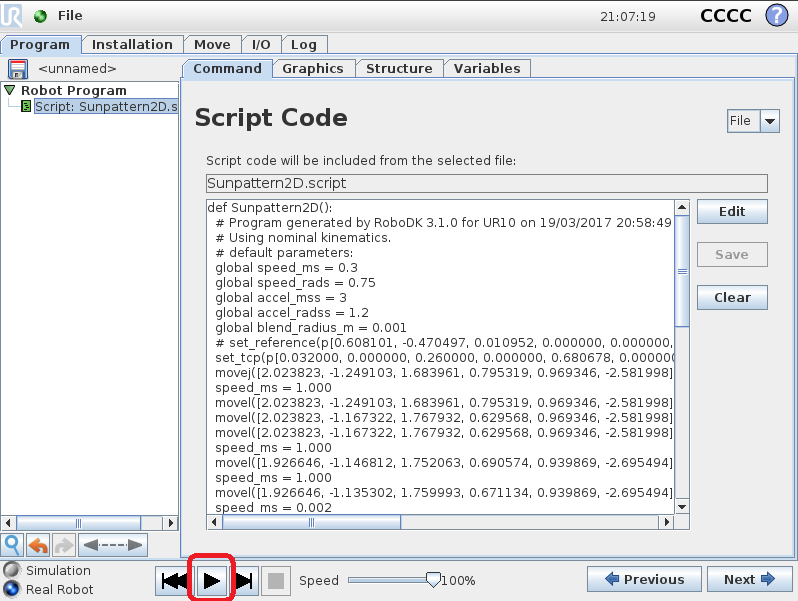
ตามรูปต่อไปนี้และขั้นตอนสรูปขั้นตอนเพื่อการสร้างโปรแกรมต้นฉบับบนหุ่นยนต์:
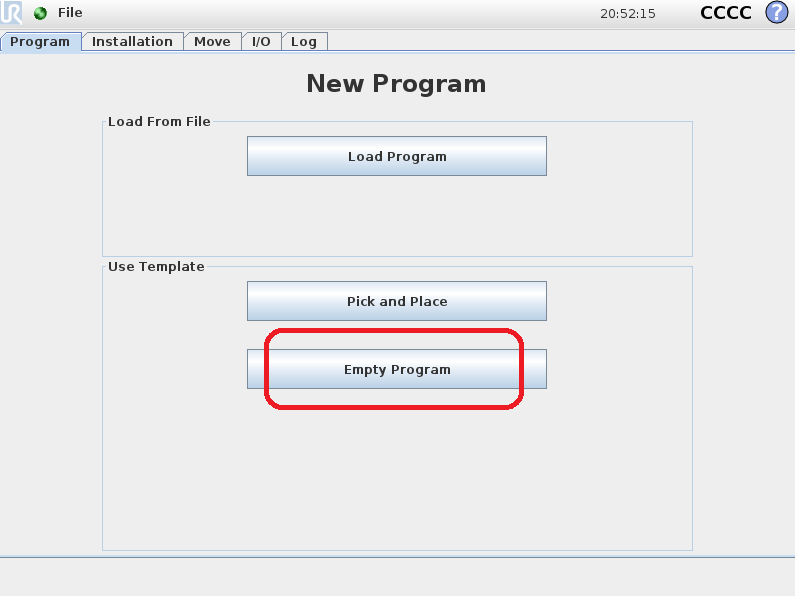
1.เลือกProgram Robotบนหน้าจอหลักของการสอน pendant
2.เลือกEmpty Program
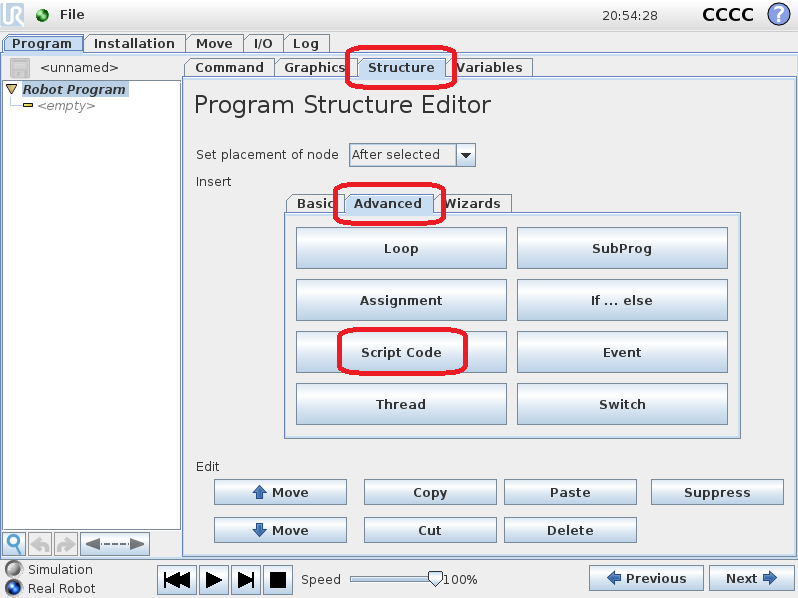
3.เลือกแถบ Structure
4.เลือกแถบAdvanced
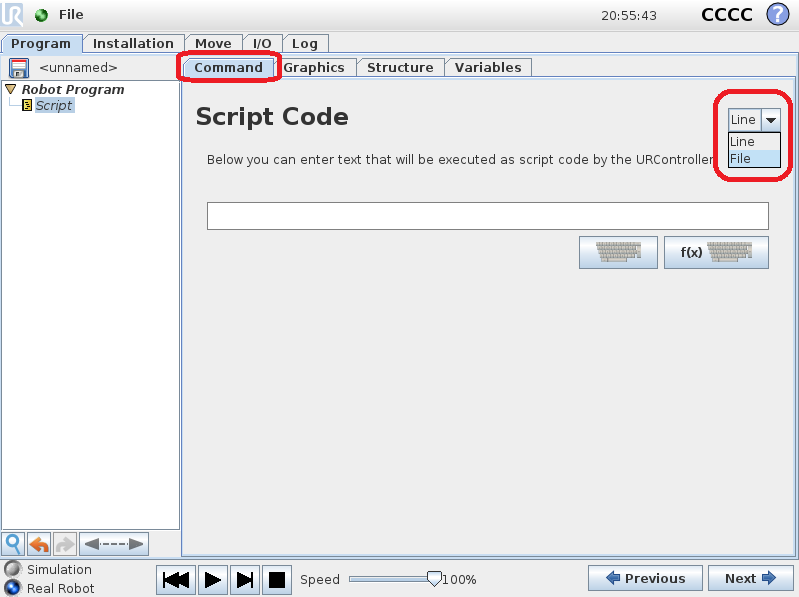
5.เลือกScript code
6.เลือกFile (ซึ่งถูกแสดงในรูปภาพ)
7.เลือกไฟล์ต้นฉบับที่ถูกสร้างด้วย RoboDK
8.เลือกไอคอนการเล่นเพื่อดำเนินการโปรแกรม
9.Select File➔Save เพื่อบันทึกการเปลี่ยนแปลง
10.สุดท้าย, โปรแกรมจะถูกสร้างขึ้น
คลื่อนย้ายโปรแกรมผ่าน (FTP)
โปรแกรมต้นฉบับถูกสร้างโดย RoboDK (เช่นการกด F6) สามารถถ่ายโอนการใช้หุ่นยนต์จาก USB disk หรือการถ่ายโอน FTP ถ้าหุ่นยนต์และคอมพิวเตอร์ถูกเชื่อมต่อ
มันถูกแนะนำให้ติดตั้งFileZilla Client บนการเริ่มต้นหรือภายในโฟลเดอร์ RoboDK ติดตั้งซึ่งมันจะถูกตรวจจับอย่างทันทีโดย RoboDK:
C:\RoboDK\FileZilla FTP Client\
เพื่อเคลื่อนย้ายไฟล์ผ่าน FTP:
1.คลิกขวาที่หุ่นยนต์
2.เลือกConnect to robot...
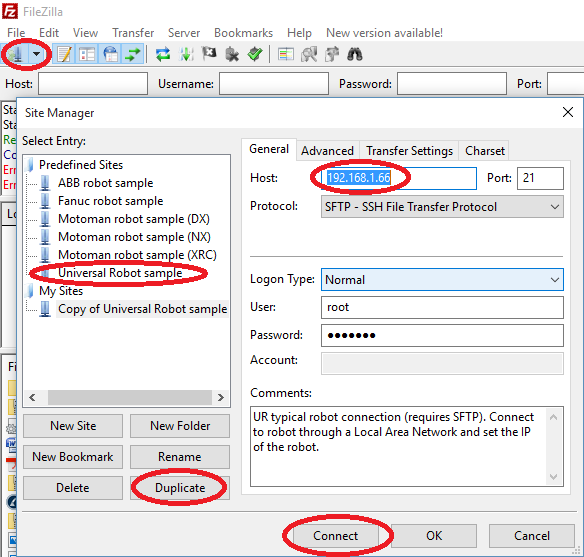
3.เลือกExploreลูกค้า FileZilla จะเปิด (ซอฟต์แวร์สำหรับเคลื่อนย้าย FTP )
4.เลือก File➔Site Manager...
5.เลือกUniversal Robot sample, ในPredefined Sites.
6.เลือกDuplicate. การคัดลอกตั้งค่าของหุ่นยนต์จะถูกสร้างขึ้น
7.ฝังIP ของหุ่นยนต์ (192.168.1.66 ในตัวอย่างนี้)
8.เลือกConnect.
9.ถ่ายโอนไฟล์ต้นฉบับก่อนหน้าการสร้างหุ่นยนต์
โปรแกรมต้นฉบับจะถูกเก็บไว้ในโฟลเดอร์/โปรแกรม/ บนหุ่นยนต์ควบคุม
อัพเดทการเคลื่อนไหวของหุ่นยนต์
ตามขั้นตอนในส่วนนี้เป็นทางเลือกหรือแค่เป็นสิ่งที่ต่อภายใต้สถานการณ์ เมื่อความแม่นยำจำเป็นในการเขียนโปรแกรมออฟไลน์ ในส่วนนี้อธิบายวิธีป้อนค่าการเคลื่อนไหวจากหุ่นยนต์ UR ใน RoboDK เพื่อทดลองอย่างแม่นยำและสร้างโปรแกรมหุ่นยนต์
หุ่นยนต์เคลื่อนไหว UR แตกต่างกันใน 6 ค่าที่แตกต่างกันจากหุ่นยนต์ตัวหนึ่งถึงอีกตัวหนึ่งและจากค่าจำลองเริ่มต้น ขึ้นอยู่กับวิธีที่หุ่นยนต์ถูกเขียนขึ้นมา อาจจะสำคัญต่อการนำค่าเหล่านี้ใส่ลงในบัญชี
การเคลื่อนไหวที่แม่นยำจากหุ่นยนต์ UR เฉพาะสามารถถูกใช้ใน RoboDK ตามขั้นตอนดังต่อไปนี้:
1.นำไฟล์urcontrol.conf.[UR3/UR5/UR10]จากโฟลเดอร์ที่เรียกว่า URControl ภายในหุ่นยนต์ควบคุม ไฟล์สามารถเป็นการถ่ายโอนการใช้ USB disk, หรือผ่านการเชื่อมต่อ FTP ซึ่งแสดงในส่วนprevious
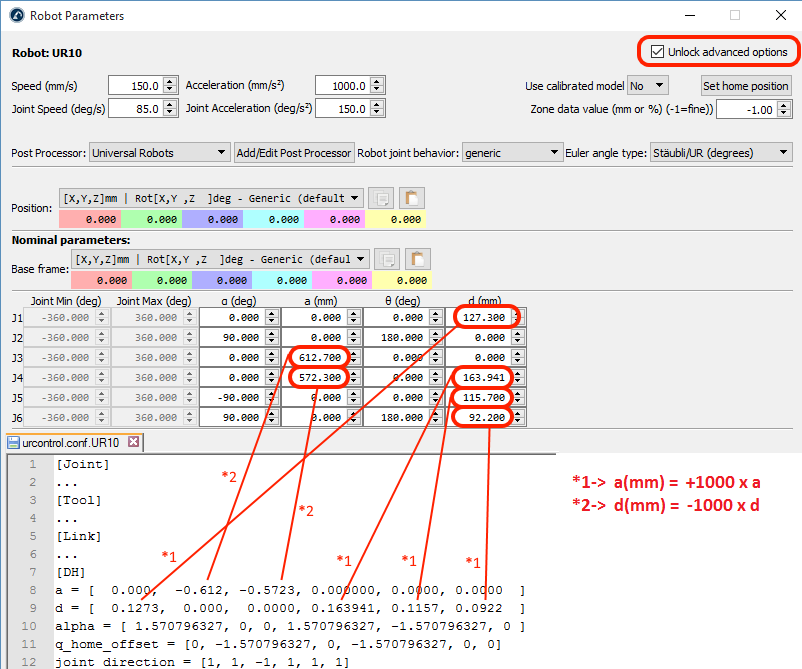
2.เปิดไฟล์ในตัวแก้ไขข้อความและดูสำหรับค่า [DH] ซึ่งแสดงในรูปภาพ
3.เปิดวินโดว์ค่าพารามิเตอร์หุ่นยนต์จาก RoboDK โดยการดับเบิ้ลคลิกหุ่นยนต์และเลือก “พารามิเตอร์”
4.เลือก “ปลดล็อคทางเลือกขั้นสูง” เพื่อทำให้สามารถแก้ไขค่า 6 เส้นทาง
5.ป้อน 6 ค่าที่มีสัญลักษณ์สีแดงจากตารางDH ในไฟล์urcontrol.conf.ur10 RoboDK, ซึ่งแสดงในรูปภาพ
เมื่อเสร็จสมบูรณ์แล้ว, เราสามารถคลิกขวาที่หุ่นยนต์และเลือกSave as .robot. ค่าพารามิเตอร์เหล่านี้ถูกบันทึกในไฟล์หุ่นยนต์
(การเปลี่ยนแปลงจากเมตรเป็นมิลลิเมตร)
การเปลี่ยนแปลงการเคลื่อนไหว UR จากหุ่นยนต์ตัวหนึ่งไปตัวหนึ่งเพราะหุ่นยนต์แต่ละตัวถูกวัดขนาดโดยโรงงาน หลายยี่ห้ออย่าง KUKA, ABB, Motoman หรือ Fanuc ไม่วัดขนาดหุ่นยนต์ ยกเว้นแต่การที่เรียกว่าAbsolute Accuracyเมื่อถูกซื้อ ทางเลือกค่าความแม่นยำที่แท้จริงอาจจะถูกนำลงบัญชีถึง 40 การวัดค่าพารามิเตอร์หรือมากกว่านั้น