Collision Map
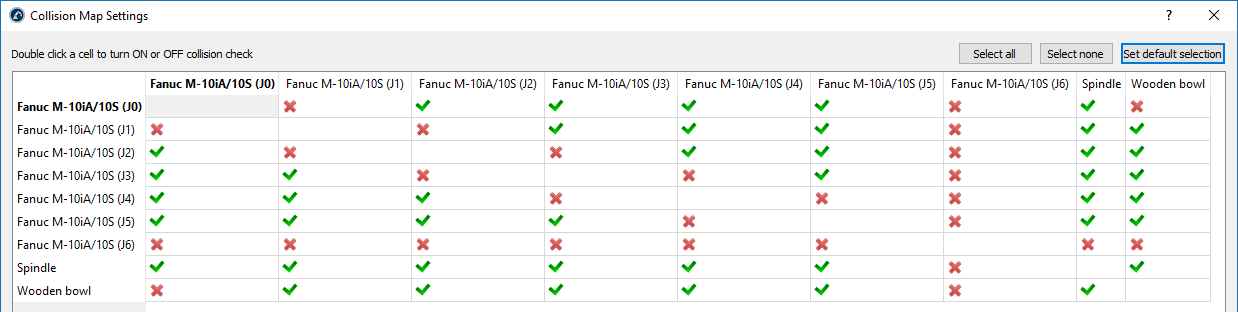
You can specify if the interaction between any pair of objects needs to be checked for collisions.
Select Tools➔
By default, RoboDK checks collisions between all moving objects in the station, including all robot links, objects and tools. As an exception, consecutive robot joints are not checked for collisions as they may always in contact.
Tip: Double click the case in the diagonal to check/uncheck collisions for a specific object against all the other objects.
Tip: If the simulation slows down because of collision checking it may be better to reduce the number of checks to use less computer power for collision checking.