Generate Roadmap
The "construction phase" of the motion planner is achieved using the following process, which generates a roadmap of the robot's workspace:
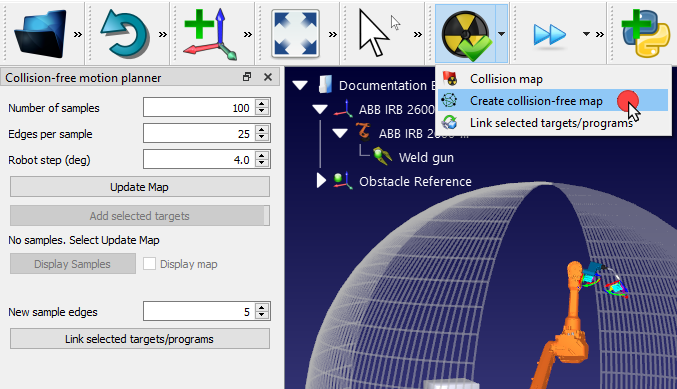
1.Open the Collision-free motion planner panel by either going to the Utilities menu➔Collision-free motion planner➔Create collision-free map or click on the small arrow next to 

2.Enter new parameters or keep the defaults.
3.Click on Update Map to generate the roadmap.
The PRM algorithm will then generate a roadmap using the chosen parameters. When it is finished, the generated roadmap can be viewed by checking the box Display Map. Clicking Display Samples will move the robot through all samples within the workspace.