Link Programs
The motion planner can also link two different programs together in a similar manner. This creates a collision-free path between the two programs and creates a new Main program.
For the welding example, create two dummy programs using the following process:
1.Create 4 targets as children of the "Object Reference" reference frame (right-click on "Object Reference" in the station tree and check Active Reference Frame). Then create four targets by choosing Program 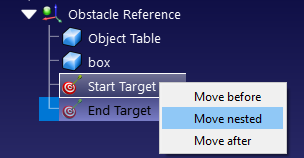
2.Select each new target in the station tree and enter the following names and values. To change the target name, press the F2 key or right-click the target and choose Rename. To change the target values, press the F3 key to bring up the Target panel or right-click the target and choose Options. Enter the new values in the section marked Target position with respect to: Object Reference.
a.Name: "Left Point 1" Values: 200, 200, 0, 90, 0, -135
b.Name: "Left Point 2" Values: 200, -200, 0, 90, 0, -135
c.Name: "Right Point 1" Values: -200, 200, 0, 90, 0, 135
d.Name: "Right Point 2" Values: -200, -200, 0, 90, 0, 135

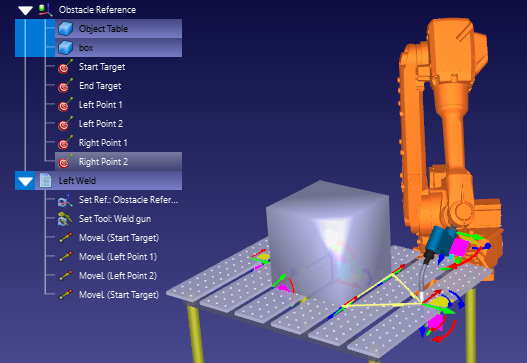
3.Create the first program:
a.Go to Program➔ 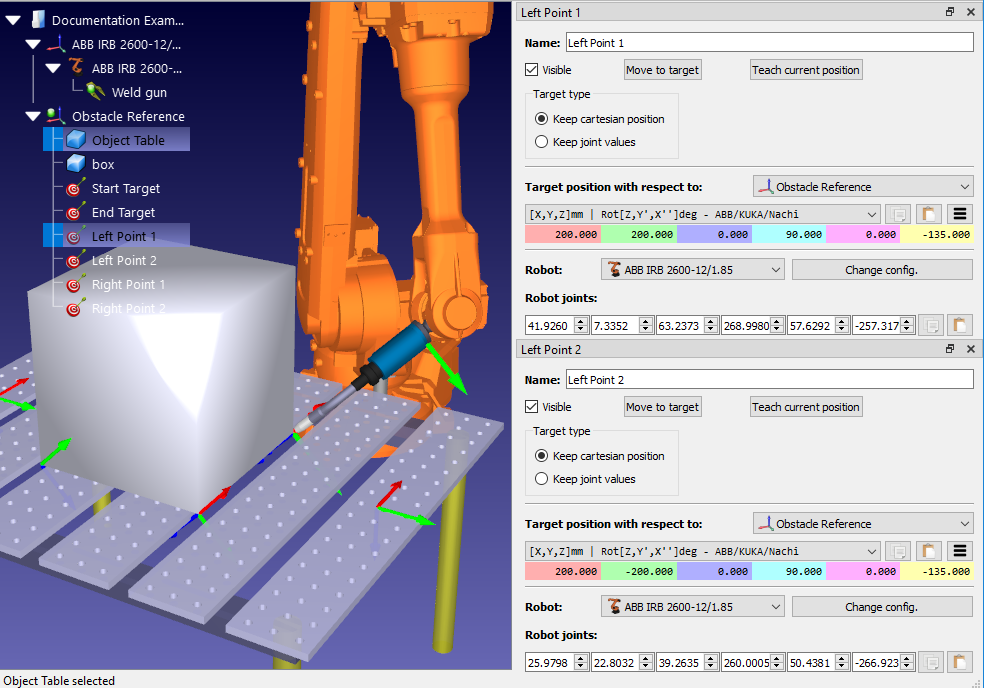
b.Rename the program to "Left Weld" by first selecting the program in the station tree and either pressing F2 or right-clicking and selecting Rename.
c.Add the following targets as linear instructions, by first selecting the target in the station tree and selecting Program➔

4.Create the second program called "Right Weld" in the same manner, this time adding the following targets: End Target, Right Point 1, Right Point 2, End Target.
Note that these two dummy programs do not contain commands to activate/deactivate the weld gun. In a real program, these commands would have to be included.
To link any two programs using the motion planner, use the following process:
1.Select both programs using either of the two methods described in the previous section (Link Targets).
2.Right click on either of the programs and choose Link selected programs. If the collision-free motion planner panel is open, the same can be achieved by clicking on Link selected targets/programs.
A new program called "MainSafe" will be created which runs the first program, makes a collision-free move, then runs the second program. This main program can be altered and renamed just like any other program.