Camera settings
The camera settings allow you to customize the parameters of your camera to have a realistic view of your camera in the simulated environment of RoboDK.
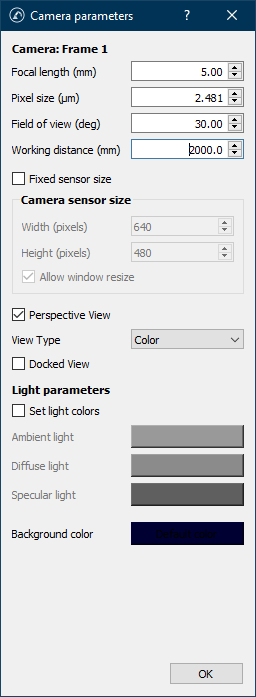
To edit the settings of a camera, right click it in the tree and select Camera settings. RoboDK provides the following default settings for newly added cameras:
●Camera: Provides the anchor name (Frame 1)
●Focal length (mm): focal length, in millimeters (5.00). This is the distance between the virtual optical center of the lens and the virtual camera image sensor. Changing this value will affect the pixel size.
●Pixel size (μm): pixel size, in micrometers (2.481). Changing this value will affect the field of view.
●Field of view (deg): field of view (FOV), in degrees (30.0). This affects the size of the area that can be perceived by the camera. Changing this value will affect the pixel size.
●Working distance (mm): working distance, in millimeters (2000.0). This is how far the camera can perceive the environment, and objects beyond that distance will not be part of the image.
●Fixed sensor size: If left unchecked, the camera sensor size (or resolution) is set by the size of the camera preview window, which can be resized by the user.
●Camera sensor size: For a fixed sensor size, provides the width and height of the camera, in pixels. Resizing the preview window will not affect the size.
●Allow window resize: Allow the user to resize the preview window without affecting the sensor size. For instance, resize the window to 720p while keeping the resolution to 4K.
●Perspective View: Unchecking this will turn the camera into an orthographic camera, removing perspectives.
●View Type: Determines the camera view type, such as Color, Grayscale or Depth. The view type will change the output image according to the relevant data.
●Docked View: Allow the preview window to be dragged to the tool bars, as opposed to a separate, floating window.
●Set light colors: Overrides the default light colors with your own (ambient, diffuse and specular light colors). It does not affect the background color, and it is only compatible with the Color view type.
●Background color: color of the unknown, of infinity. This is the color used if no objects are encountered from the camera sensor to the working distance.