Hand-eye calibration
Hand-eye calibration is the process of calibrating the position of the camera with respect to the robot flange or tool.
RoboDK allows you to simulate the process of hand-eye calibration. You can use the same procedure to calibrate real cameras with respect to the robot flange or tool.
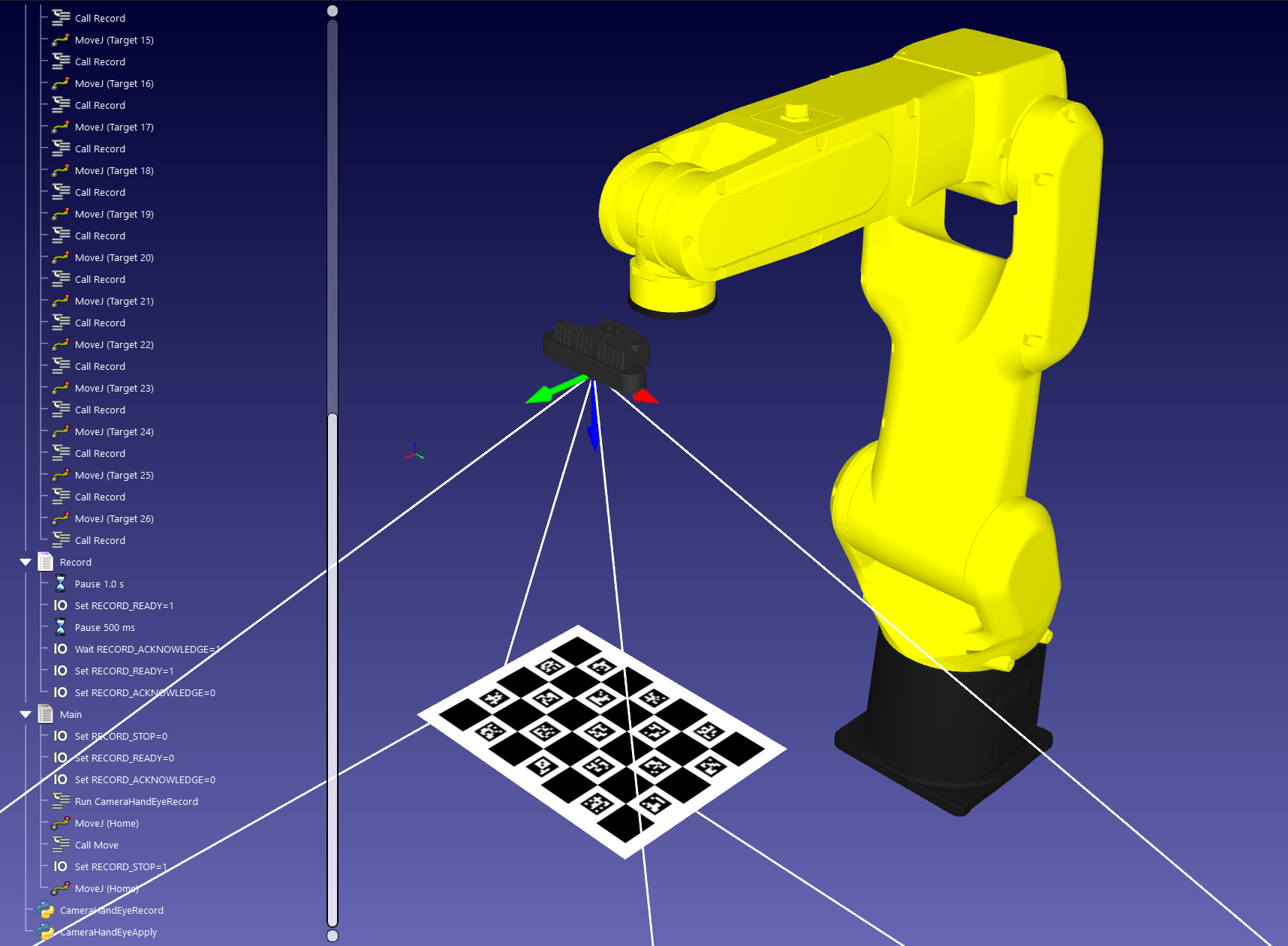
You can find a fully working example in the examples section of the RoboDK API for Python: https://robodk.com/doc/en/PythonAPI/examples.html#camera-hand-eye-calibration.