Add an Approach Program
You can easily create a new program that safely approaches the robot to the part.
Follow these steps to create a program that moves from the Home target to the Approach target:
1.Select Program➔
2.Rename the program to ApproachMove.
3.Select the Home target.
4.Select Program➔
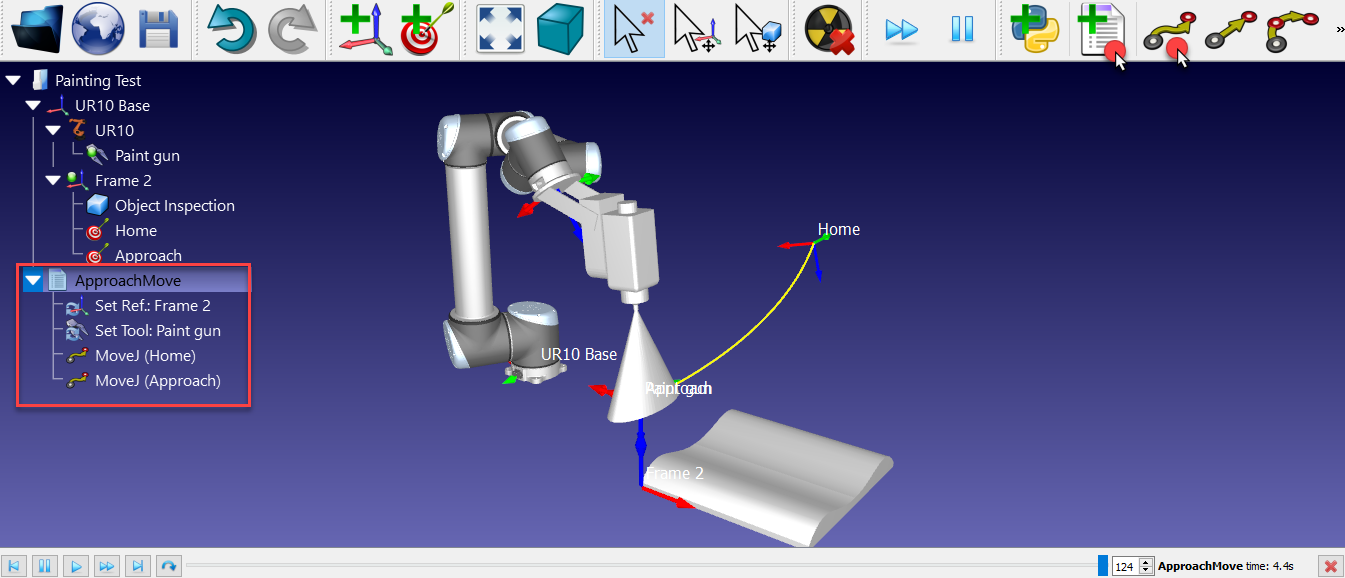
Two instructions will be added automatically to tell the robot what tool frame and reference frames we are using.
5.Select the Approach target
6.Select Program➔
Double click the ApproachMove program and it will execute the program simulation. The simulation bar and an estimated cycle time will be displayed.