Generate a Robot Program
Once you have the simulation ready in RoboDK you can easily generate the robot program. The robot program allows you to run the program on the robot controller without having to write a single line of code.
Follow these steps to generate a robot program:
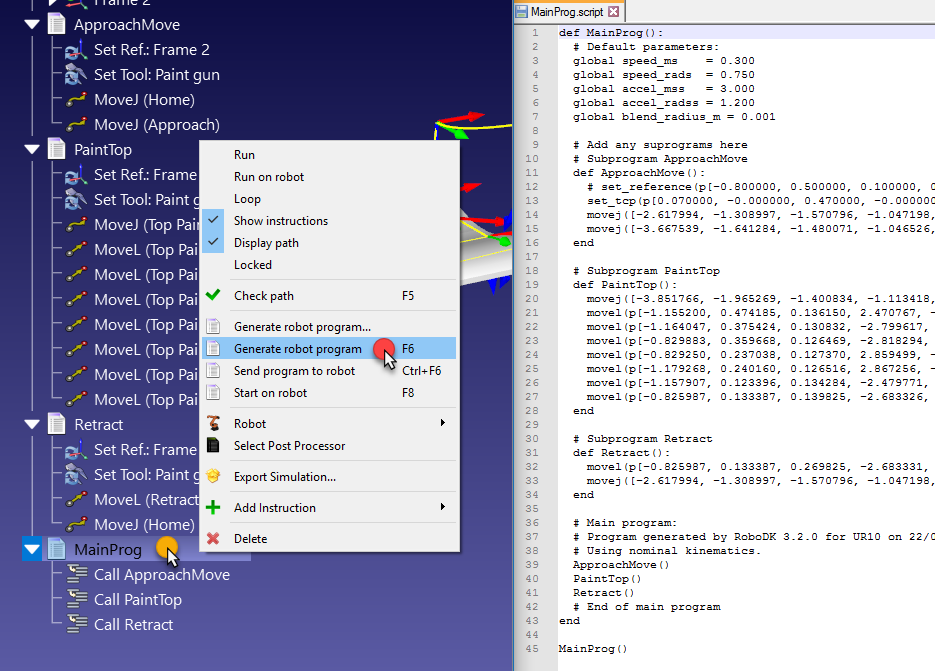
1.Right click the program (MainProg for example). You can also hold Ctrl to select multiple programs at once to generate them.
2.Select Generate robot program (F6). Alternatively, you can select Generate robot program as… to specify the location to save the file.
You should then see the robot program displayed in a text editor.
You can find more information about how to generating robot programs in the Programs section.
In this example, you’ll obtain the SCRIPT program file for your UR robot. For Universal Robots specifically, you can export any program individually or the main program including the subprograms.
The file you obtained is the result of generating the program offline. The file can be sent to the robot controller to run the same movements that were simulated in RoboDK.
It is possible to change the post processor for UR robots and customize the way a program is generated:
1.Right click a program or a robot.
2.Select 
3.Select Universal Robots URP.
Generate the program again. In this example, the default post processor uses joint values to define each linear move and the second post processor uses cartesian coordinates to define each linear move.