Move the Tool geometry
The geometry of the tool might not be aligned properly with respect to the robot flange (adaptor reference frame) when it is loaded in RoboDK.
The following steps assume that a mistake was made, and the tool was mounted 180 degrees around the Z axis, so the following correction should be applied:
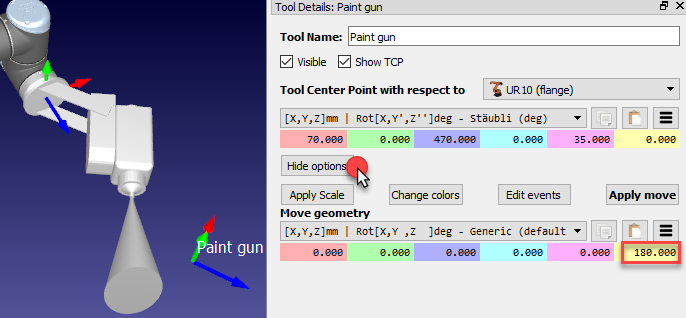
1.Select More options in the Tool details window
2.Enter 180 in the yellow case (Z rotation) of the paint gun geometry, as shown in the following image. The mouse wheel can be used on top of each case to quickly update the position on the main screen.
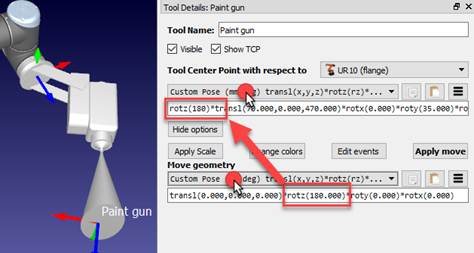
Tip: If the TCP was defined before this operation, the TCP won’t match the geometry anymore. To update the position of TCP to the right location we could follow the steps described at the beginning of this section (by holding the Alt key or entering the values manually). Alternatively, we could rotate the TCP around the robot flange by selecting the Script (custom pose) representation method (as shown in the next image) and insert the Z rotation pre-multiplying the TCP definition (at the beginning of the TCP line definition).
Note: More information about how to provide transformations and poses available in the reference frames section.