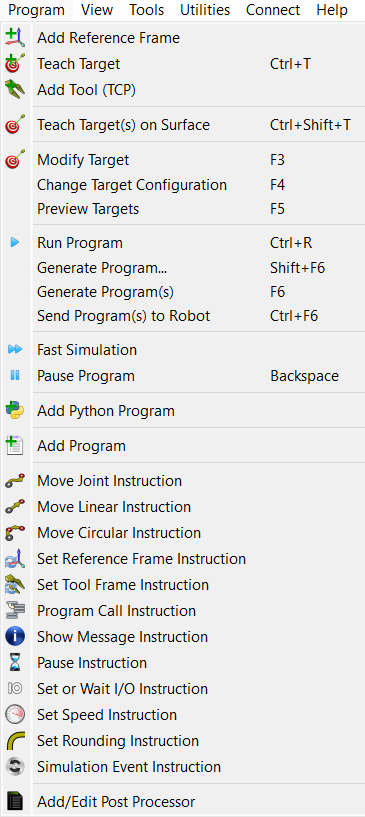
The program menu contains all the components related to Offline Programming (OLP) and program generation. It is possible to add new programs, reference frames, targets or tools to robots. These Offline Programming components (reference frames, tools, targets, etc.) appear on all programs generated offline.
Add Reference Frame will add a new reference frame attached to the station root or attached to another reference frame if that reference frame was selected.
Add empty tool will add a new TCP to a robot. No geometry is required to add a new tool. Multiple Tools allow referencing different parts of the same geometry linked to one tool.
Teach Target (Ctrl+T) will add a new target to the Active reference frame for the Active robot tool. The active reference frame and active tool can be selected in the robot panel. It is also possible to right click a reference frame or a tool to make them active.
Teach Targets on Surface (Ctrl+Shift+T) will allow the user to select points of an object to easily create targets. An example is available in this section.
Add Program will add a new program that can be created using the RoboDK Graphical User Interface (GUI). No programming experience is required to create or modify this type of robot program. The robot program can be simulated and generated for a specific robot, automatically and easily.
The Program Instructions section of the Offline Programming document provides more information about available program instructions through the GUI.
Add Python Program option will include a sample Python program/macro/script/module in the station that links to the RoboDK API. A Python program using the RoboDK API allows creating robot programs from generic programming code (Python). It is possible to deploy these programs for any specific robot controller. It is also possible to simulate specific tasks to extend the GUI programs. These tasks can be robot subprograms for offline programming, online programming or simply simulate specific events such as making objects appear automatically at random spots for a pick and place simulations. A Python program is like a text file embedded in the station and contains Python code to automate specific tasks in RoboDK. The RoboDK API is deployed using Python by default but other programming languages can be used to interface with RoboDK.
Note: The difference between a normal program (using Add Program) generated using the Graphical User Interface (GUI) and a Python program (using Add Python Program) is that the first does not require programming experience. On the other hand, a Python macro using the RoboDK API allows extending the limits of a program generated using the graphical user interface.
Finally, it is possible to Add or Edit Post Processors. Post Processors define the way programs are generated for a specific robot controller, allowing to accommodate vendor-specific syntax. Post Processors are final component of the offline Programming Process.