Robot Configurations
One robot configuration defines a specific state of the robot. Changing the configuration requires crossing a singularity. Robot controllers can’t cross a singularity when a linear movement is being made (a joint movement would be required for that).
In other words, to accomplish a linear movement between two targets the robot configuration must be the same for the complete movement, including the first and last points.
Right click a robot and select Change configuration to open the robot configurations window. It is also possible to open this window by selecting More options in the robot panel.
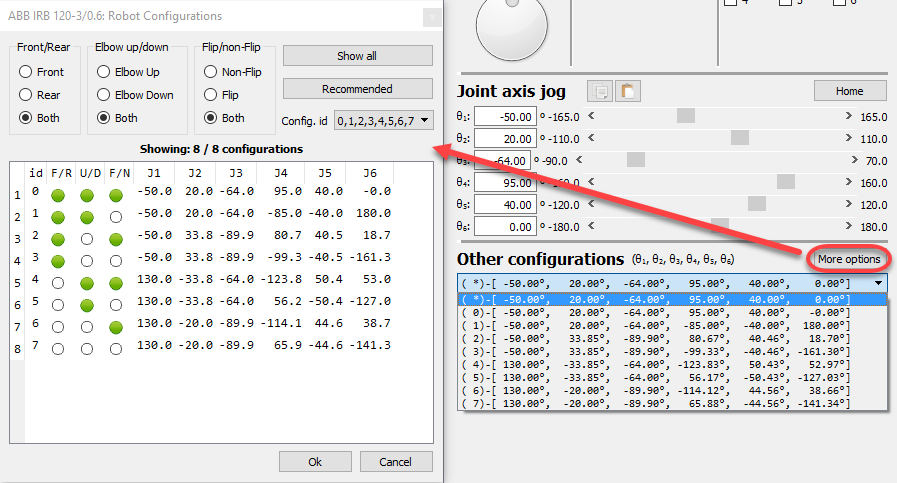
For a standard 6-axis robot there are typically 8 different configurations for any position of the robot if we assume each robot axis can move one full turn. In practice, joint limits can be more or less constrained depending on the robot. Therefore, it may be possible to have from 1 to more than 100 different robot configurations for a specific location depending on the robot.
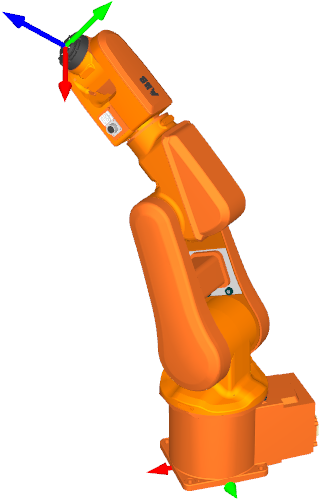
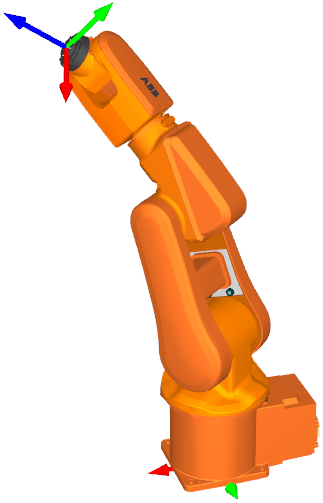
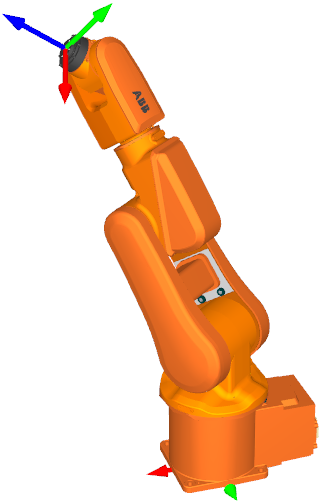
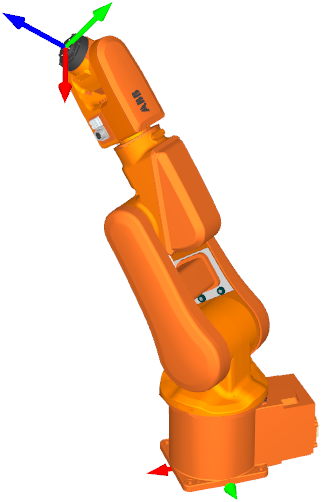
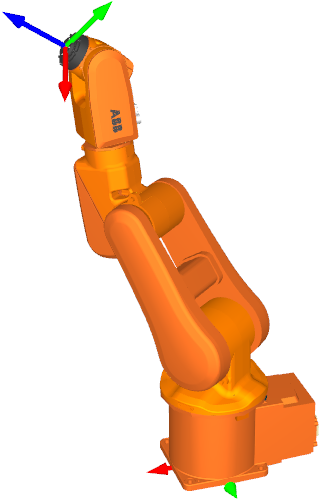
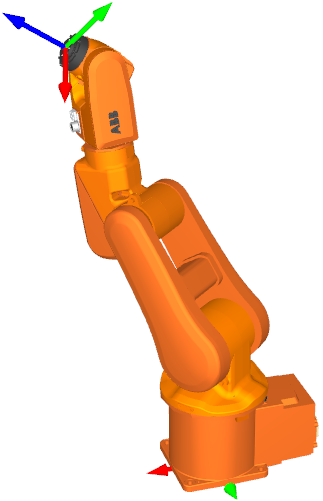
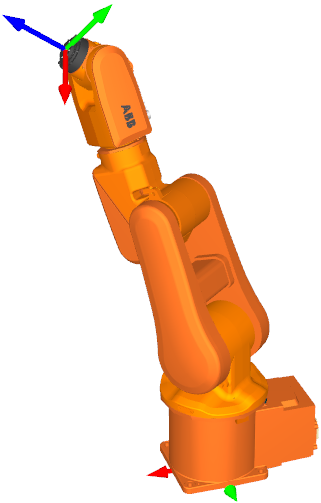
One robot configuration defines a specific way (assembly mode) of reaching a position with the robot. For example, the robot can have the elbow up or the elbow down (Up vs. Down, or U/D), at the same time it can be facing the target or the base can rotate 180 degrees to reach the target backwards (Front vs. Rear, or F/R). Finally, joint 5 can flip by switching the sign at the same time axis 4 and axis 6 compensate for that move (Flip vs. Non-Flip, or F/N). In total, this provides the 2*2*2=8 configurations.