RoboDK Plugin for MecSoft
Introduction
The RoboDK add-in for MecSoft software allows you to quickly set up robot machining projects directly from RhinoCAM and Visual CAD/CAM. With the RoboDK integration for MecSoft CAD/CAM software you can easily combine RhinoCAM or Visual CAD/CAM machining software with RoboDK to simulate and program industrial robot arms for robot machining.
More information about RoboDK for robot machining is available in the Robot Machining Section.
This document describes how to set up the RoboDK plugin for Mecsoft software and how to use RhinoCAM and Visual CAD/CAM to set up robot machining projects in RoboDK.
RhinoCAM Setup
Follow these steps to automatically setup your robot machining project from RhinoCAM:
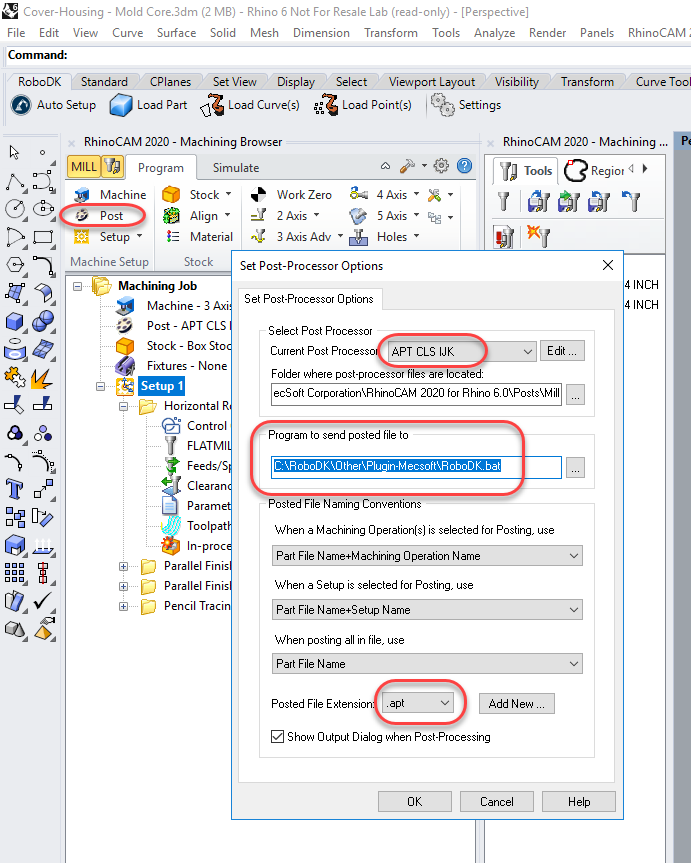
1.Select the Program tab in the RhinoCAM Machining Browser.
2.Select Post
3.Set the Post Processor to APT CLS IJK
4.Set the Program to send posted file to:
C:\RoboDK\Other\Plugin-MecSoft\RoboDK.bat
5.Select OK
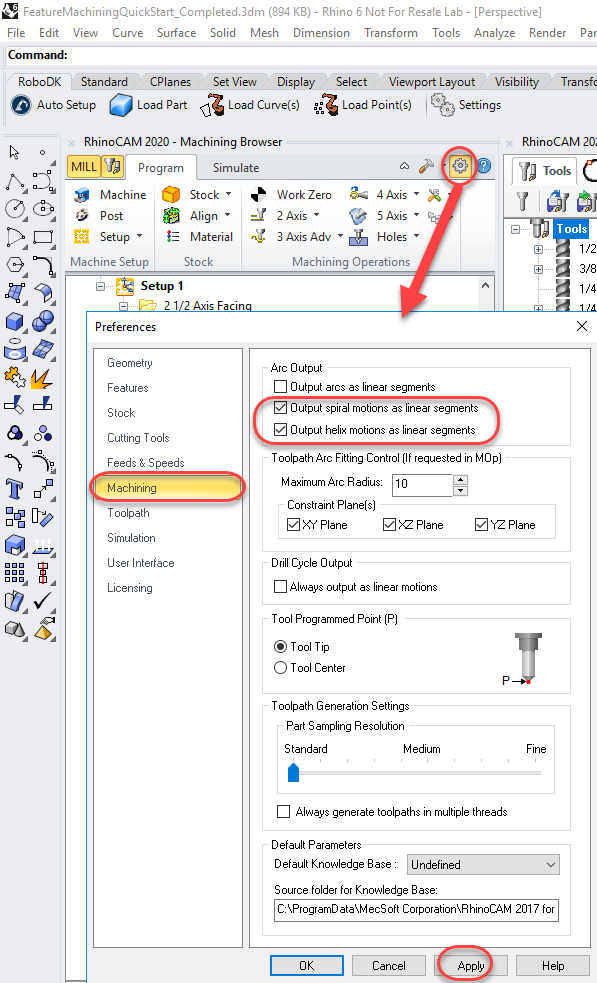
You should also generate helix and spirals as linear movements (not as a Helix command). Helix commands are not supported by industrial robots. You should follow these steps to change this setting:
1.Select the CAM Preferences button (as shown in the following image).
2.Select the Machining tab
3.Check Output spiral motions as linear segments.
4.Check Output helix motions as linear segments.
Workflow
This section describes the default RoboDK behavior when you post a machining toolpath to RoboDK (as described in the previous section).
Posting a machining program to RoboDK automatically creates a new project using a default cell ready for robot machining. The cell includes a robot a tool and a coordinate system/datum that represents the robot machining reference.
If you already have a RoboDK station open it will use the existing RoboDK project without overriding the robot, tool or coordinate system.
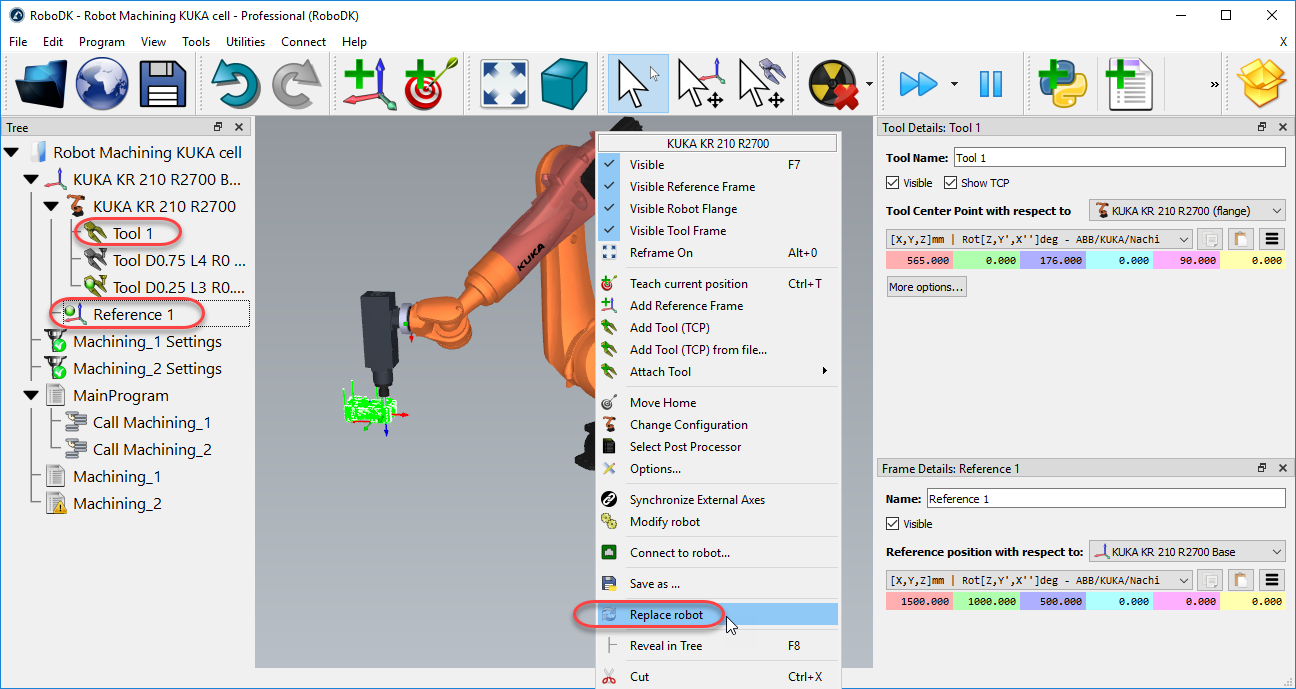
You can easily change the robot, modify the tool and/or the reference frame. As an example, follow these steps to change the robot:
1.Right click the robot
2.Select Replace robot (as shown in the following image)
3.Select the robot you would like to use
The RoboDK installer only provides a few robots by default, however, it is possible to download more robots from the online library.
More information about adding a robot tool is available in the Getting Started Section.
Save the project to keep the changes by selecting File➔Save Station (Ctrl+S).
Simulate robot machining
Once you’ve updated your robot cell, select Utilities➔Update Robot Machining Project (Ctrl+U) to update all programs. A green check mark will be displayed if the programs are feasible with the current cell parameters. If there are any issues (such as singularities, axis limits or reach issues), a red mark will be displayed.
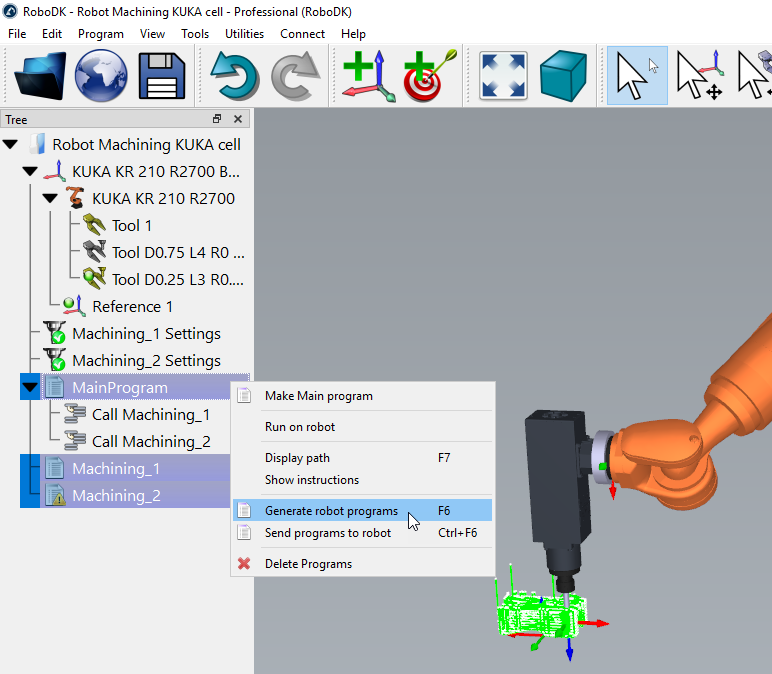
Double click the robot machining project 
Right click a program and select Run to simulate it (or double click the program). You can also select Generate robot program (F6) to generate the robot program for your robot controller. More information about how to generate robot programs is available in the Offline Programming section.
You can also right click a program and select Select Post Processor to change the post processor. More information about post processors available in the post processors section.
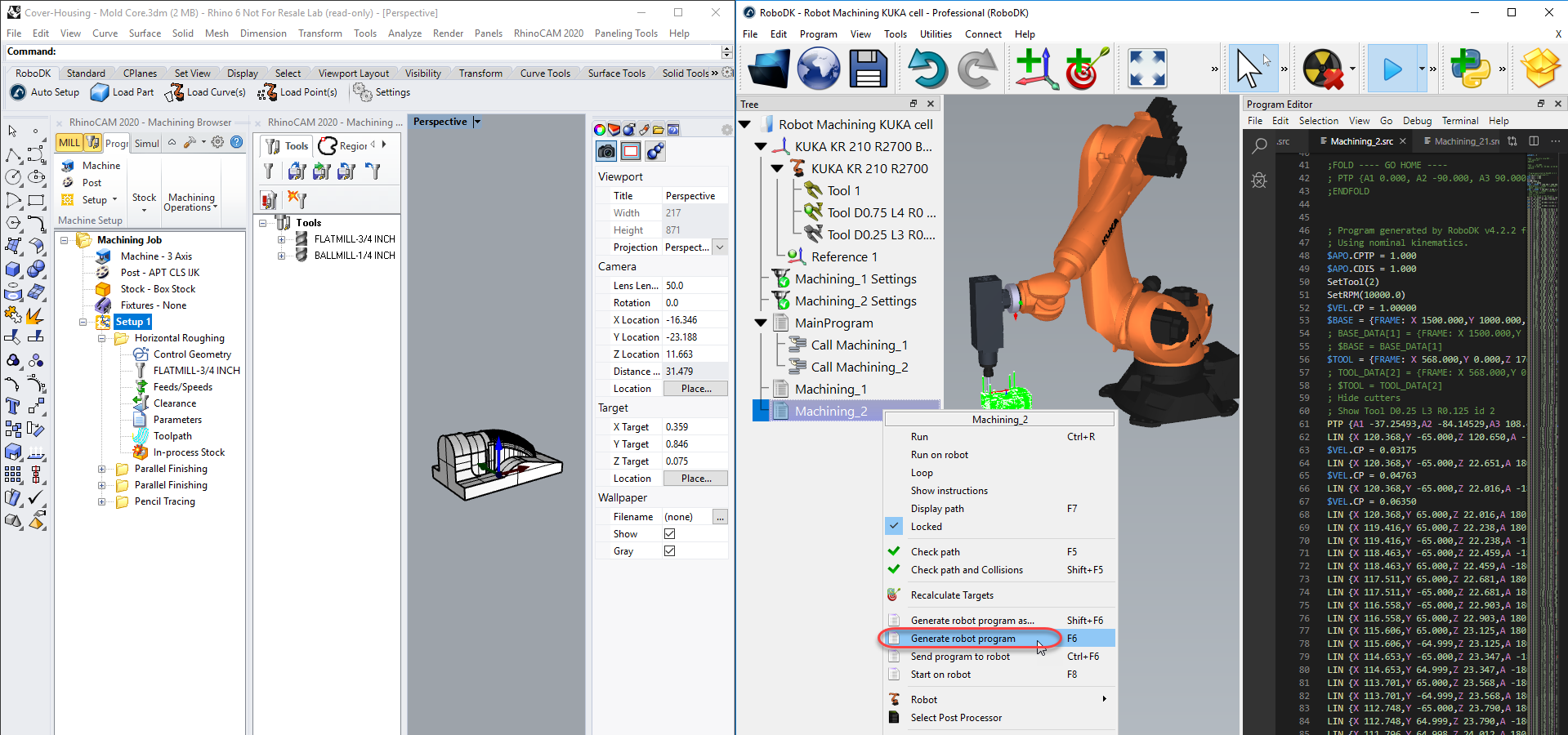
Generate robot programs
Right click a program in RoboDK and select Generate Robot Program (F6) to generate the robot programs for robot machining.
Follow these steps in RoboDK to change the location of your saved robot programs:
1.Select Tools-Options
2.Select Program
3.Select Set beside the Robot programs folder
RhinoCAM Examples
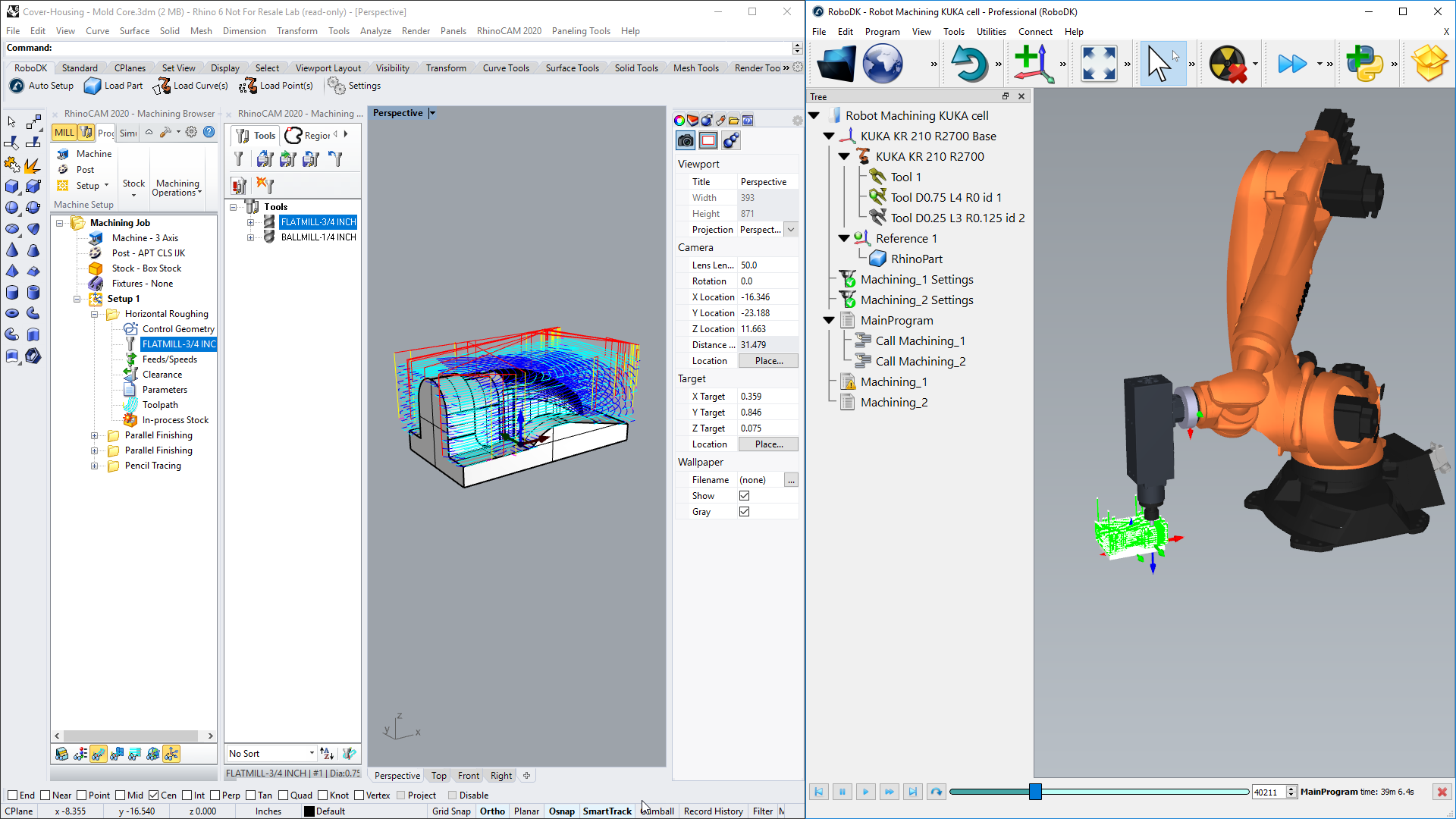
3-Axis Robot Machining with RhinoCAM
This example shows how to create a 3-axis robot machining project using RhinoCAM and RoboDK.
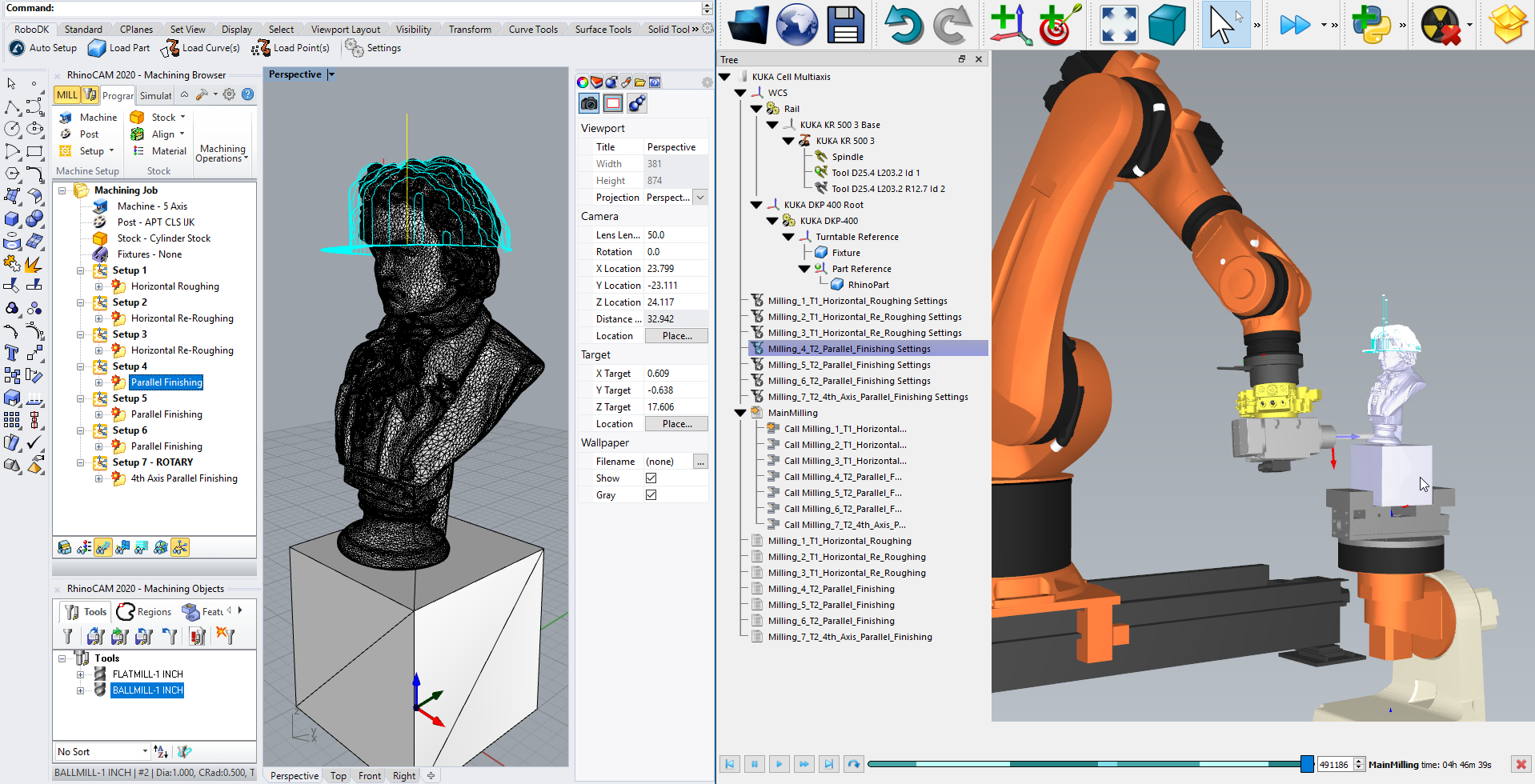
5-Axis Robot Machining with RhinoCAM
This example shows how to create a 5-axis robot machining project for sculpting using RhinoCAM and RoboDK. This project uses a KUKA robot synchronized with a linear rail and a two-axis turntable (9 synchronized axes).