Realistic Robot Simulation (RRS)
Realistic Robot Simulation (RRS) is a standard that allows providing accurate robot simulations and cycle time estimates. This RRS standard allows integrating original controller software into simulations and offline programming software.
The RRS add-ins for RoboDK add accurate robot path and cycle time to existing RoboDK simulations and programs. This RRS add-in allows you to directly interface with the Robot Controller Software (RCS) module of a robot manufacturer. The RCS is essentially the proprietary motion planning software of the robot manufacturer.
With the RoboDK RRS add-in, users can achieve highly accurate simulations of robot behavior by generating accurate toolpaths and cycle times within RoboDK.
Requirements
To enable the RRS support for RoboDK you first need to acquire the RCS module from the robot manufacturer. This is usually a library (such as a dll file on Windows) that is sold and activated separately.
We suggest placing the RCS module of the robot manufacturer in C:\RoboDK\api\RRS\%BRAND%\. However, the source path can be specified through the Add-in.
RoboDK RRS Interface
RoboDK provides a configurable Python interface to the RRS-1 implementation of any robot manufacturer RCS. In addition, it provides the necessary utilities and baselines to interact between RoboDK and the RRS interface.
Although the RRS implementation across different robot manufacturers should be consistent, the baseline provided by the interface may need some tweaking for a specific brand. RoboDK provides vendor specific implementation of the RRS interface.
RoboDK RRS for Comau (Add-in)
The RoboDK RRS for Comau is a specific RoboDK Add-in for Comau robots. To install a RoboDK Add-in, please refer to the Add-in section of the documentation.
Once you have acquired and activated the required RCS modules from Comau, you can start using the RoboDK RRS for Comau Add-in.
To create an RRS program, follow these steps:
1.Open the settings with Program➔RRS for Comau➔Settings
a.Set the robot ID. This is normally 0.
b.Set the path to the robot folder. This is usually the main folder containing .c5g, .CIO and .xml files.
c.Set the path to the robot file. This is the .c5g file contained in the robot folder.
d.Set the path to the RRS DLL file, usually rcscomau.dll.
2.Generate the RRS program by Right-Click your program➔Generate RRS Program (Comau)
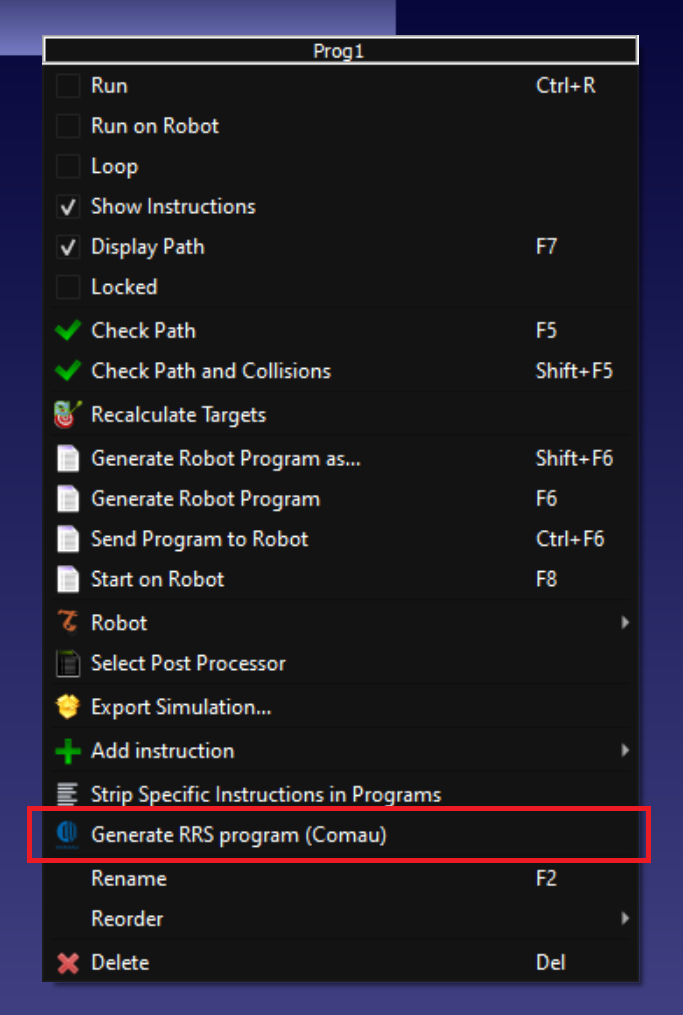
A new program will be created with accurate joints and the cycle time estimation will be provided in the program name.