Python OLP
Python programs can be generated offline using the same Python code used to simulate the robot (as shown in the previous Python Simulation section). Offline Programming allows generating robot programs that can be executed on a specific robot controller:
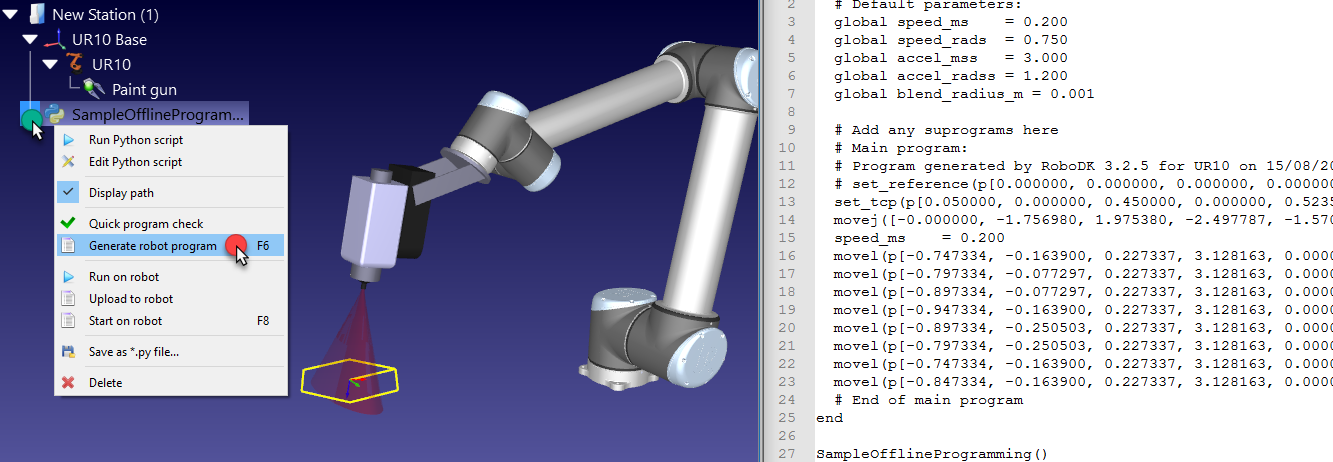
1.Right click a 
2.Select Generate robot program (F6)
In this case the program is not simulated but executed quickly to obtain the result: a robot program specific to a robot controller.
Tip: Right click a robot and select Select Post Processor to specify a different post processor for offline programming (as shown in the Post Processor section).
Note: The Generate robot program option will automatically set the RunMode of the RDK/Robolink connection to RUNMODE_MAKE_ROBOTPROG. In other words, it is possible to programmatically generate the vendor-specific program instead of simulating it if the Python program is being executed outside of RoboDK’s GUI. For example:
RDK = Robolink()
RDK.setRunMode(RUNMODE_MAKE_ROBOTPROG)