RoboDK API
C# programs are simulated by default when robot commands are used (such as MoveJ, MoveL or setDO). When the sample C# project is started, the simulation mode is also selected by default.
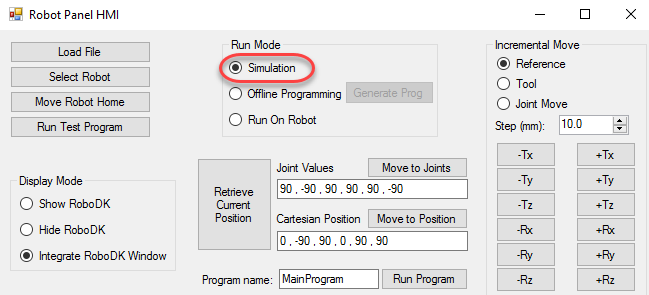
This means the robot movements will be simulated in RoboDK. For example, we can move the robot by steps of 10 mm selecting the buttons on the right (+Tx, -Tx, …), or we can select Run Test Program to run a hexagonal movement around the current location of the robot.
Set any breakpoints to debug your application and inspect robot targets. Robot targets can be defined as joint coordinates or Mat variables (4x4 pose Matrices) and they can be inspected as XYZWPR format to troubleshoot program issues. More information about reference frames in the Reference Frames section.

It is also possible to change the Run Mode to Offline Programming or Online Programming (Run on Robot), as shown in the following sections.