Path Accuracy
To perform path accuracy tests, it is required to have a robot program created with RoboDK, such as the ISO9283 program created by the Create ISO cube utility. We can generate the vendor-specific robot program by selecting the program and pressing F6 (or selecting Program➔Generate program). Alternatively, it is possible to use any other program created in RoboDK (such as a straight line, a circle or a square).
It is also required to have a measurement system that can track the position of the end effector and provide the position measurements with respect to a reference frame. It is required to use the base setup and tool setup procedures in RoboDK (required to perform calibration or position accuracy tests) to identify the robot base frame and tool frame.
The measurement data must be acquired while moving the robot along the program. The measurements should be recorded continuously, using the default software provided by the manufacturer of the measurement system. It is required to export the measurements as a CSV or TXT file. These files must contain XYZ position data as well as the time stamp for each measurement. Optionally, these measurements can contain the orientation of the tool with respect to the robot base.
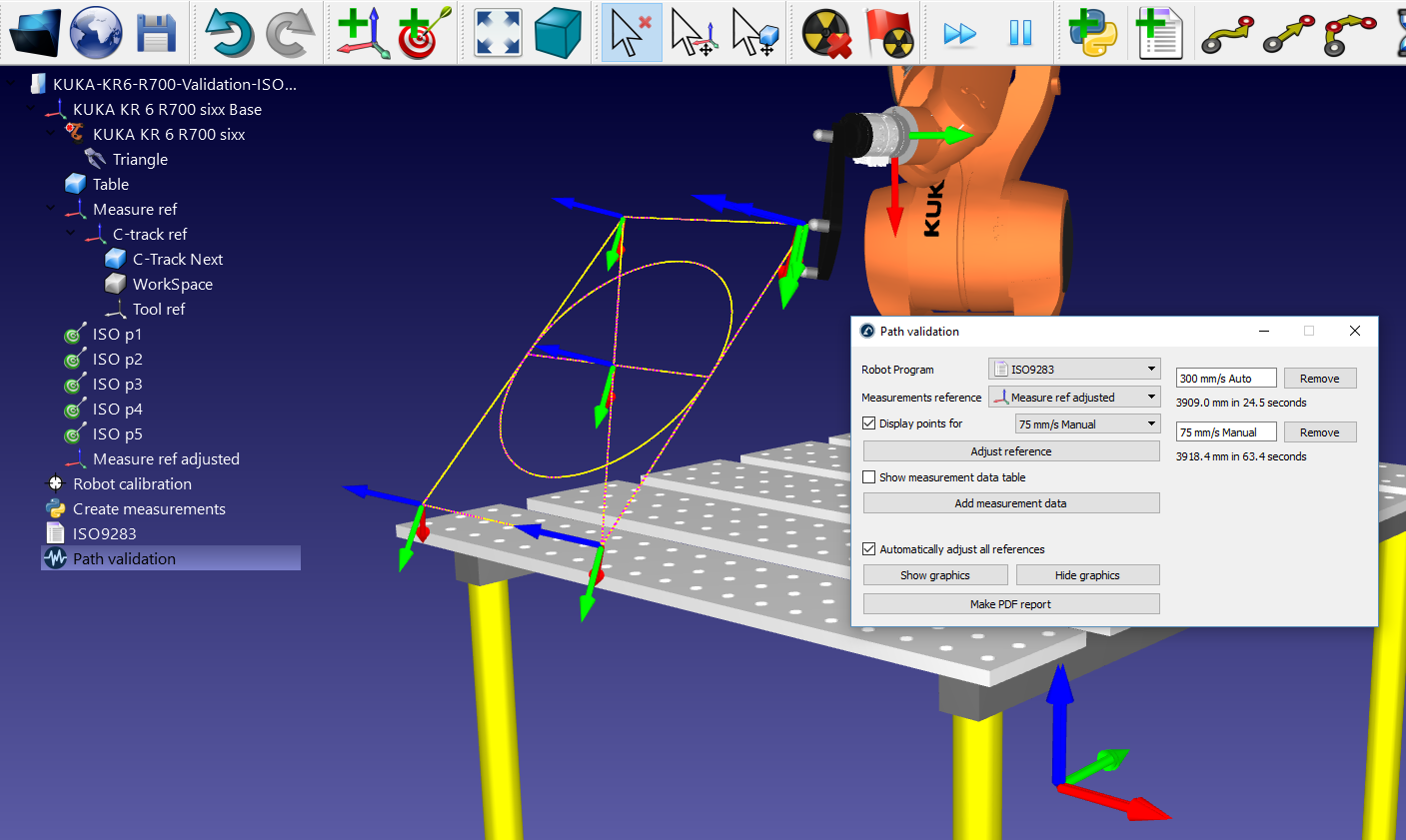
To start a path validation project in RoboDK:
1.Select Utilities➔Test path accuracy, speed and acceleration (ISO 9283)
2.Select the program used for validation from the dropdown menu
3.Provide the reference frame used for the measurements
4.Import the measurement data by selecting Add measurement data. Alternatively, it is possible to drag & drop the CSV or TXT files containing the measurements to the Path validation window.
Finally, select Make PDF report to generate a PDF with some statistics and graphics about the path accuracy, speed and acceleration. It is possible to run the same test more than once under different conditions (different speeds, different rounding/cornering values, different payloads, …) to compare these parameters in the same report.
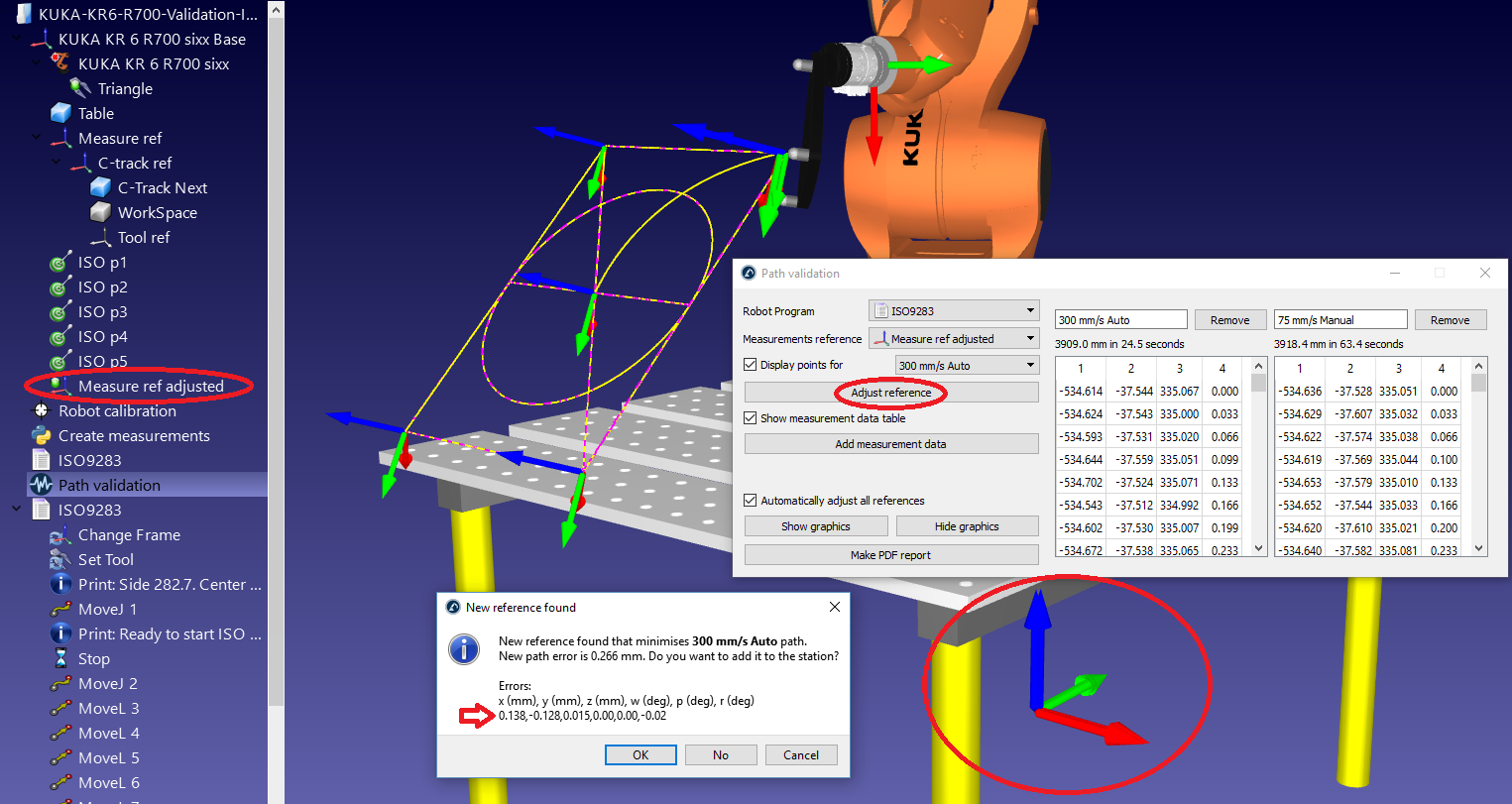
The measurement points can be displayed in violet. These measurements should match with the yellow path that describes the ideal path that the robot must follow. The statistics provided by RoboDK are the differences between these two paths.
If the reference frame was not properly defined the measurement points do not match the yellow path. This can happen for several reasons, such as a bad reference frame definition or a different tool definition. In this case selecting Adjust reference will try to best fit the two paths so that the statistics provided isolate these misalignments.