Updating controller kinematic parameters
This section explains how you can update the kinematic parameters (DH table) on the robot controller after calibrating the robot using RoboDK’s Calibration and Performance package.
Modifying the controller DH parameters will impact all programs manually created on the controller. Keep a copy of the original DH parameters in case you would like to revert back to the controller factory settings.
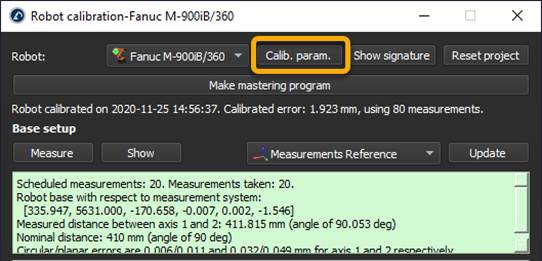
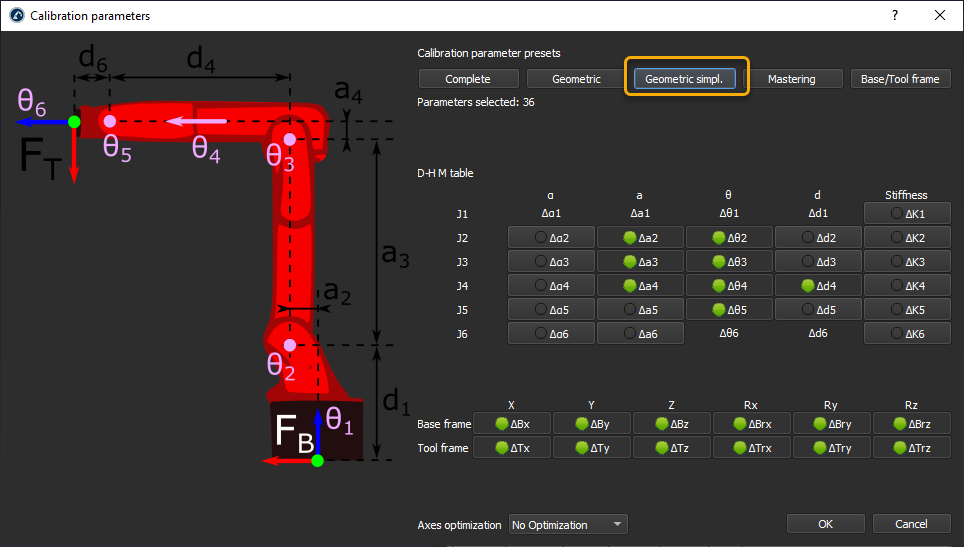
1.In the calibration window, open the Calibration parameters.
2.Select Geometric simplified.
3.Run a calibration sequence or Update an existing one.

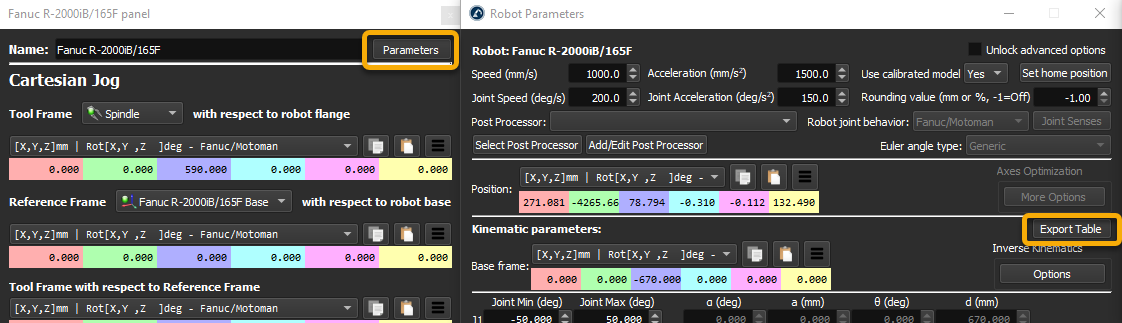
4.Retrieve the robot calibrated DH parameters. In the Robot panel and select Parameters. Then select Export Table.
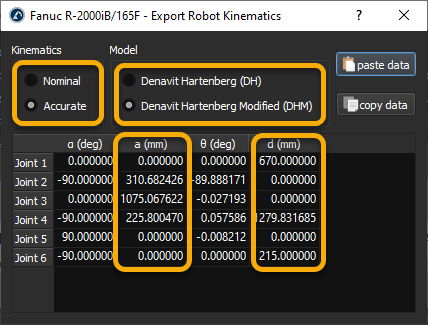
5.Make sure to use the Accurate kinematics. The Nominal one can be used to compare with the controller default DH parameters.
6.Use the Danavit Hartenberg Modified model to modify your controller parameters.
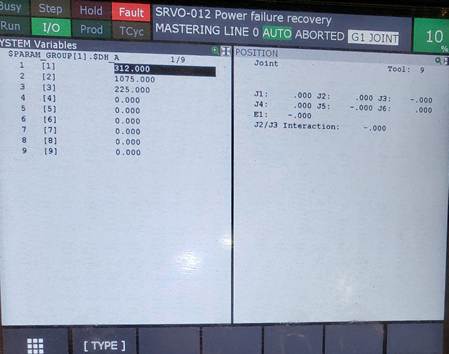
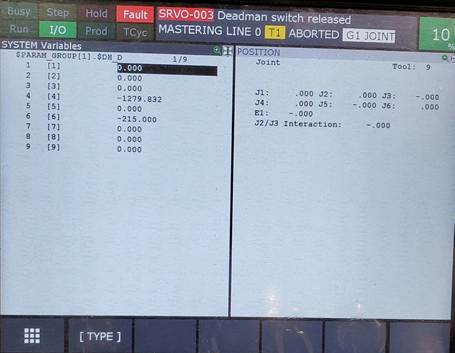
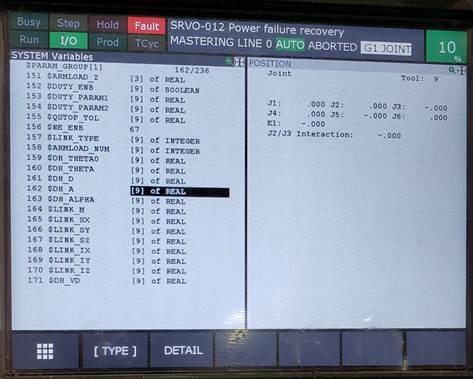
7.On the robot teach pendant, open the System variables -> $PARAM_GROUP[1].
8.Find the $DH_A and $DH_D parameters.
9.Modify the DH values with the a and d values from the Export Robot Kinematics window.