Run a Program on the KEBA controller
Once your RoboDK simulation is ready, you can generate a program offline that can be executed by the KEBA robot controller (KAIRO file).
Follow these steps to generate a program for your controller (KAIRO file) from your robot simulation:
1.Right click a program.
2.Select Generate robot program F6. Then manually transfer the files over FTP to your desired project
Alternatively, Select Generate robot program Ctrl+F6 after setting up SFTP
3.On the project tab of the teach pendant, press refresh
4.Load the program then load the main file

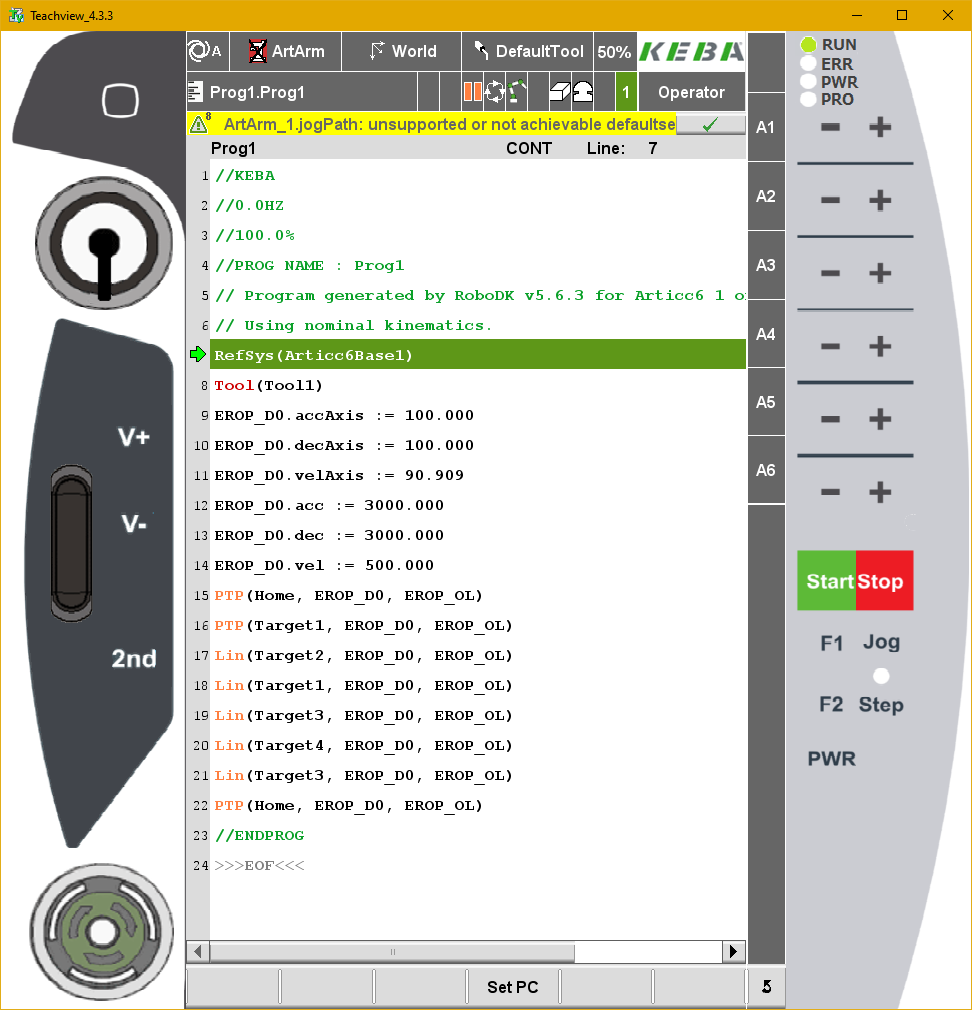
The program will be displayed in a text editor. You can find more information about how to generate programs from RoboDK in the robot program section of the documentation.
Tip: It is possible to select among different post processors or customize post processors to define the way programs are generated (for example, to support a gripper or external sensors).