RoboDK driver for Yaskawa Motoman
Robot drivers provide an alternative to Offline Programming. With the Yaskawa/Motoman drivers you can move a robot directly from RoboDK as you simulate your program (Online Programming). More information available in the Robot Drivers section.
Since RoboDK version 4.2 you can connect to the robot controller using RoboDK’s robot driver using the High-Speed Ethernet Server (HSE) protocol and the driver called MotomanHSE. This driver does not require you to have the MotoCom software option. This communication protocol (also called “Remote”) is available by default with recent Yaskawa robot controllers. This protocol allows you to move and monitor the robot from a computer at a refresh rate of 70 Hz.
Select Connect-Connect to Robot, enter the robot IP and select Connect (you can ignore the port). Make sure you are using the latest driver path that supports HSE protocol (MotomanHSE).
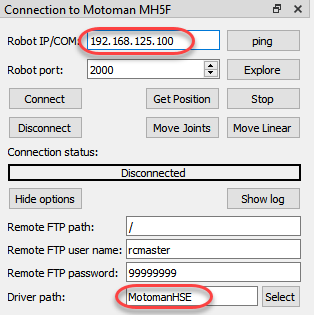

This allows using RoboDK’s Run on robot option for online programming and debugging. The connection can be established through a standard Ethernet connection (TCP/IP - UDP).
The configuration should be done automatically and there is no need to set up anything specific on the robot controller side.
The following controllers work with the High-Speed Ethernet Server driver:
●DX100
●DX200
●FS100
●NX100
●YR1000
A connection between RoboDK and any Motoman robot can also be established to move the robot automatically from a connected PC using RoboDK and Motoman’s MotoCom software option and the apimotoman driver.