Run Program from RoboDK
Robot drivers provide an alternative to Offline Programming (where a program is generated, then, transferred to the robot and executed). You can run a simulation from RoboDK directly on the robot (Online Programming). More information available in the Robot Drivers section.
RoboDK offers two different drivers: apiur and DriverUR. The apiur driver is legacy, but can still be used to control modern systems based on PolyScope 5.22 and below. The DriverUR is the preferred driver for connecting to the modern UR robots.
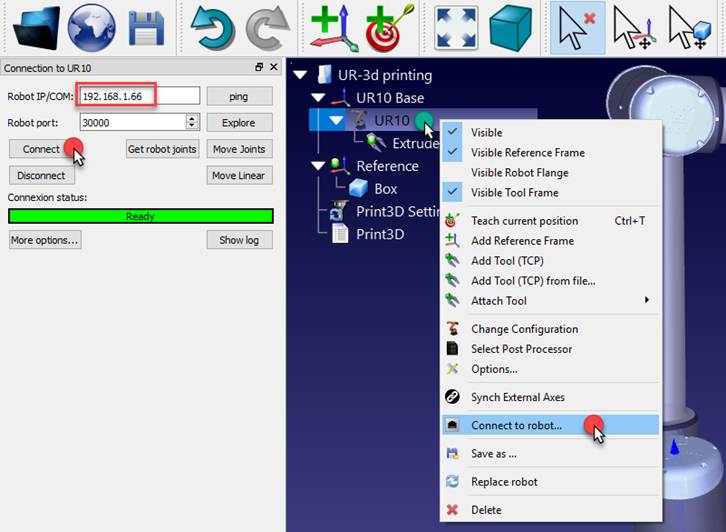
Follow these steps to connect to the robot from RoboDK:
1.Right click the robot in RoboDK
2.Select: 
3.Enter the IP of the robot
4.Click the More options button to know exactly which driver is being used and to be able to change it (optional).
5.Select Connect.
There should be a green message displaying Ready if the connection succeeded.
The robot can be moved by selecting Get robot joints, Move Joints and Move Linear, from the connection menu.
There are two different methods to run the program from the PC to the robot:
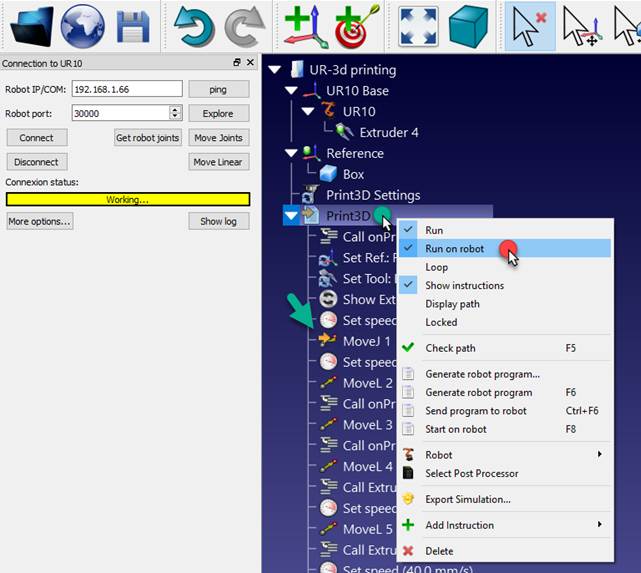
1.Run on robot step by step with feedback in RoboDK (Online Programming):
This method uses the robot as a server and each instruction is sent to the robot step by step as it is executed in the simulator. This method is useful for debugging purposes.
a.Right click the program (Print3D in this example)
b.Select Run on robot
c.Double click the program to start it (or right click and select Run)
Once this option is checked it will connect to the real robot every time we double click a program (or right click, then, select Run)
These operations are also available from the RoboDK API and it allows integrating robot programming with other applications. The API is available in Python and C# and other programming languages.
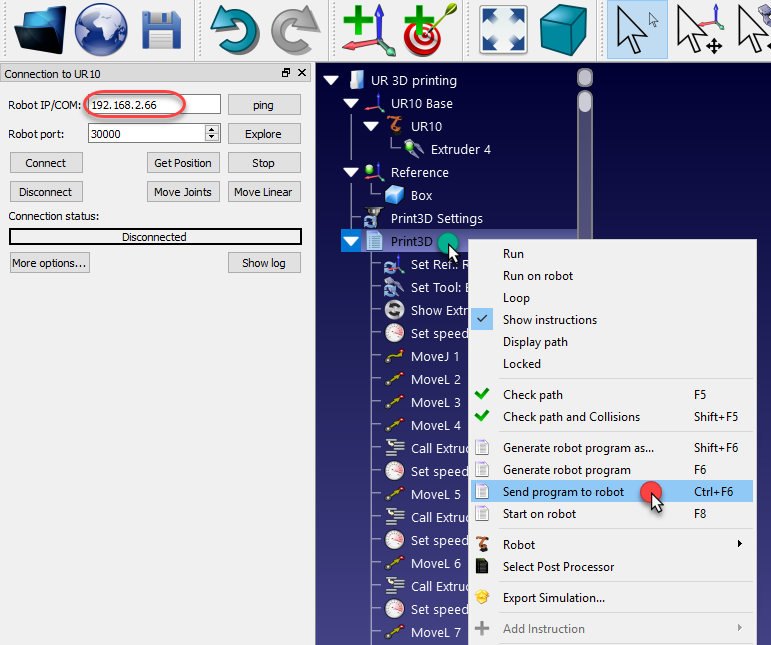
2.Send program to robot generates the complete program, transfers it to the robot and starts the program on the real robot (Robot Offline Programming):
a.Right click the program (Print3D in this example)
b.Select Send program to robot (Ctrl+F6).
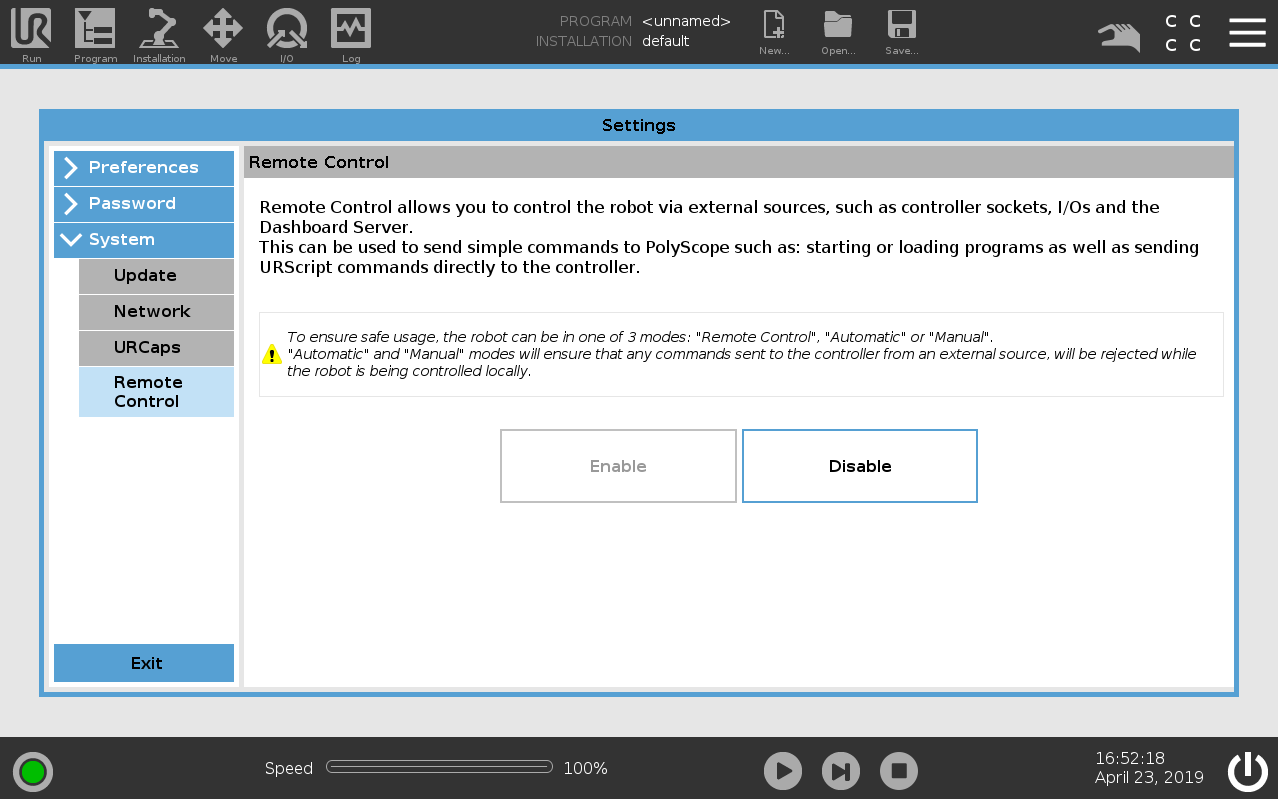
How to enable Remote Control on URe
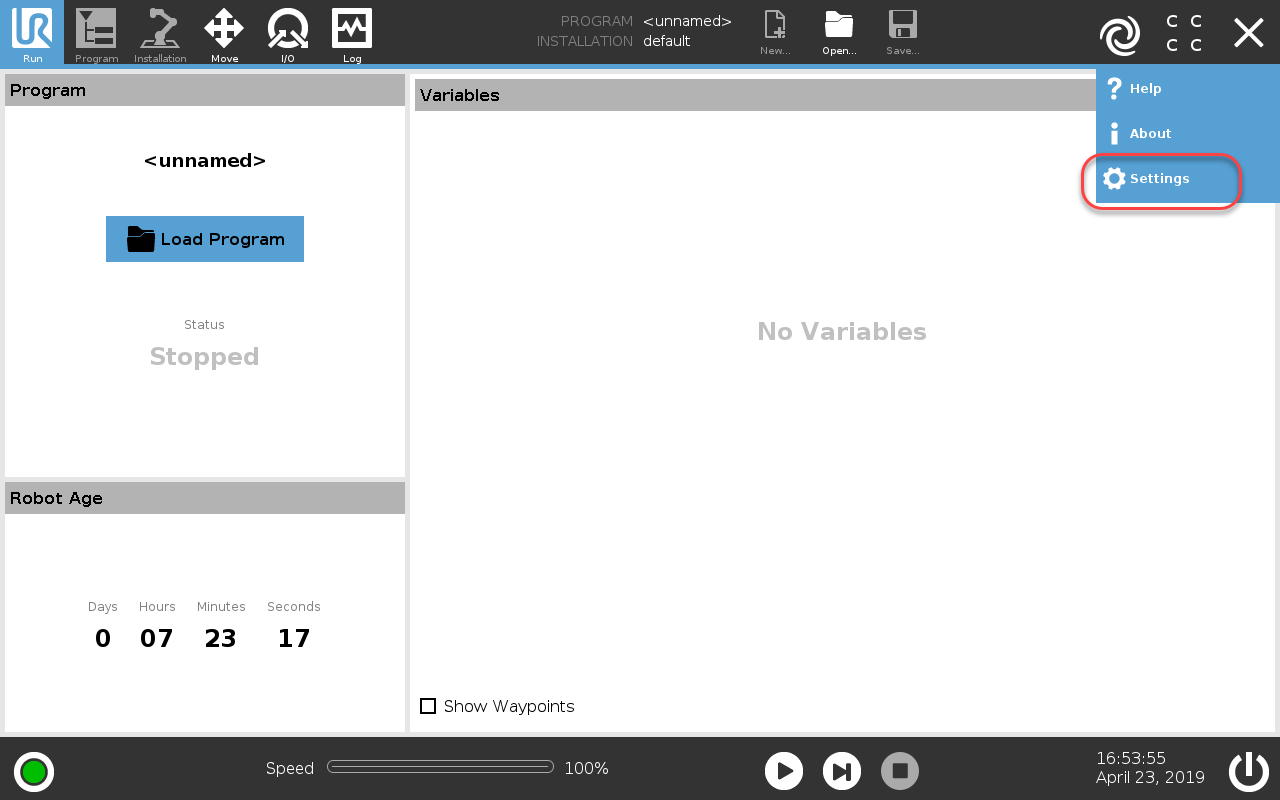
You should enable the Remote Control option on the UR robot controller if you have a URe robot (UR3e, UR5e or UR10e).
Follow these steps to enable URe’s Remote Control:
1.Select the Settings menu from the top right button
2.Select System-Remote Control
3.Select Enable
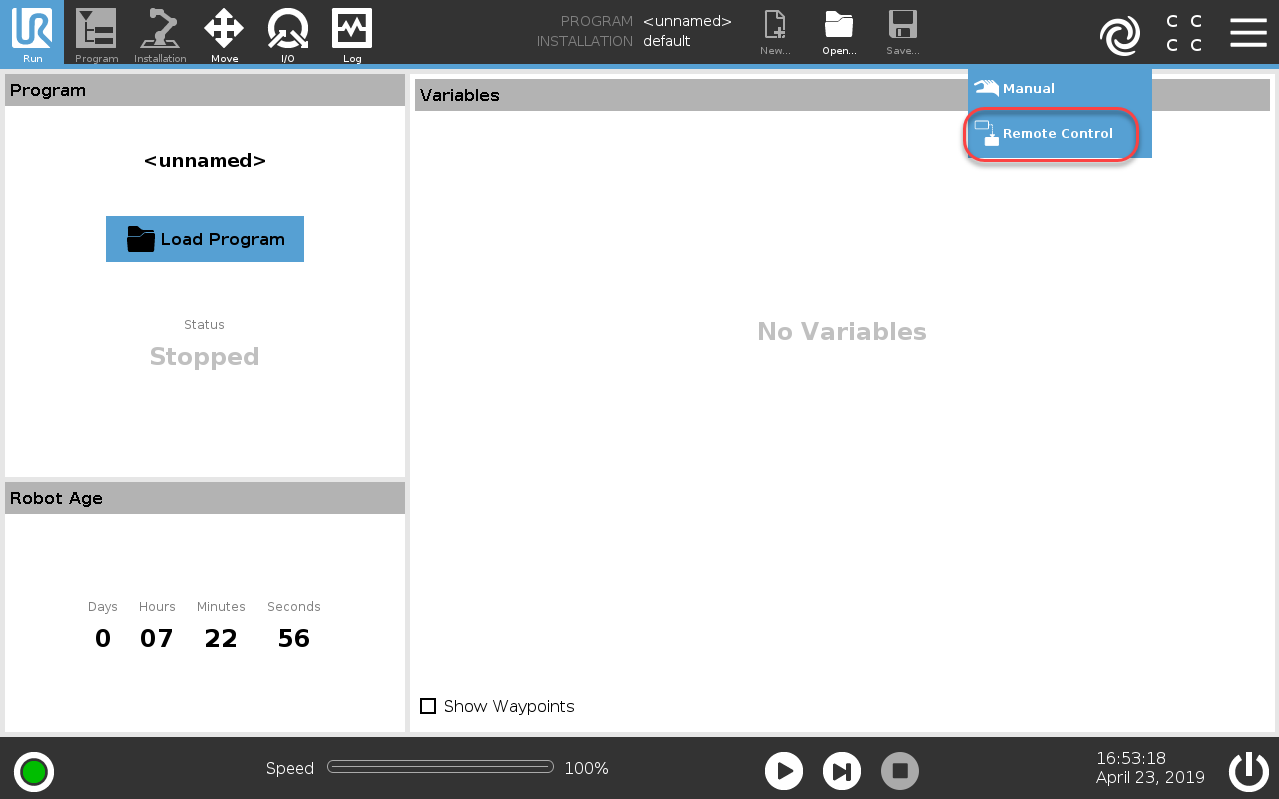
4.Change the mode of operation to Remote Control
Network connection details
The RoboDK driver connections to UR control systems are bidirectional. This means that the driver not only connects to the remote system as a client, but also acts as a server at the same time, waiting for a counter connection from the control system. That counter connection from the UR control system to the RoboDK computer is considered by the latter as an external incoming connection. Such connections are most often blocked by the operating system firewall. If completely disabling the firewall on your system is not acceptable, then use the table below to accept the necessary inbound and outbound connections:
Purpose | Direction | Protocol | Port Number (apiur) | Port Number (DriverUR) |
Secondary Interface | RoboDK → UR | TCP | 30002 | 30002 |
Real-Time Interface (RTDE) | RoboDK → UR | TCP | not used | 30004 |
Reverse Interface | UR → RoboDK | TCP | 30000 | 50001 |
Script Sender | UR → RoboDK | TCP | not used | 50002 |
Trajectory Interface | UR → RoboDK | TCP | not used | 50003 |
Script Command Interface | UR → RoboDK | TCP | not used | 50004 |