Using the RobotiQ gripper from RoboDK
You can operate the RobotiQ gripper directly from the UR controller by generating programs offline using RoboDK.
To add support for RobotiQ grippers you should select the Universal_Robots_RobotiQ post processor:
1.Right click a program or your robot
2.Select Select Post Processor
3.Select Universal Robots RobotiQ
Tip: Changing the post processor linked to a program applies to all programs that use the same robot.
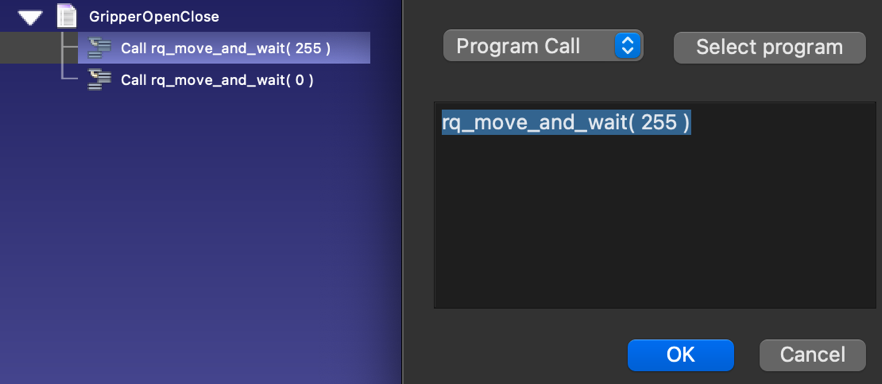
You can then generate program calls that can operate the RobotiQ gripper. For example: rq_move_and_wait( 255 ) to open the gripper or rq_move_and_wait( 0 ) to close the gripper.
Once you have the program ready in RoboDK, you can run it on the robot using one of these 2 methods:
- Right click a program (such as the GripperOpenClose) and select Send Program to Robot
- Right click a program (such as the GripperOpenClose) and select Generate Program (this second option requires you to manually load the program on the robot).
This method of operation does not require using the driver.
Tip: Learn more about how to generate programs in the programs section.