Program Filtering
Once the robot has been calibrated, we need to make sure we generate filtered programs or account for calibrated robot parameters to make sure we take advantage of the robot calibration.
We should follow one and only one of the following methods to program robots accurately after calibration:
1.Use RoboDK for Offline Programming to generate accurate programs (generated programs are already filtered). This is the recommended offline programming option for optimal accuracy results.
2.Calibrate robot controller parameters (such as link lengths, DH-DHM parameters and/or mastering parameters).
Accurate Offline Programming
When a robot has been calibrated with RoboDK we have the option to activate accurate kinematics by right clicking the robot and selecting Use accurate kinematics.
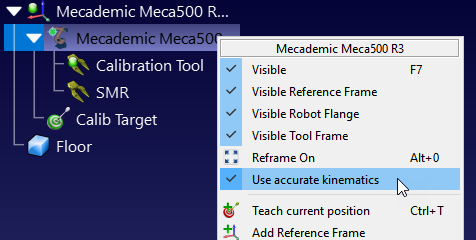
If accuracy is active, we will see a green dot, if it is not active, we will see a red dot.
This is the recommended option to have optimal accuracy results. With the robot accuracy option activated in RoboDK, all programs generated by RoboDK will be automatically filtered. This means that all Cartesian coordinates will be slightly modified to compensate robot errors.
This is the most suitable option if you are planning to use your robots for robot machining, program robots from NC files or use any of RoboDK’s supported CAD/CAM plugins.
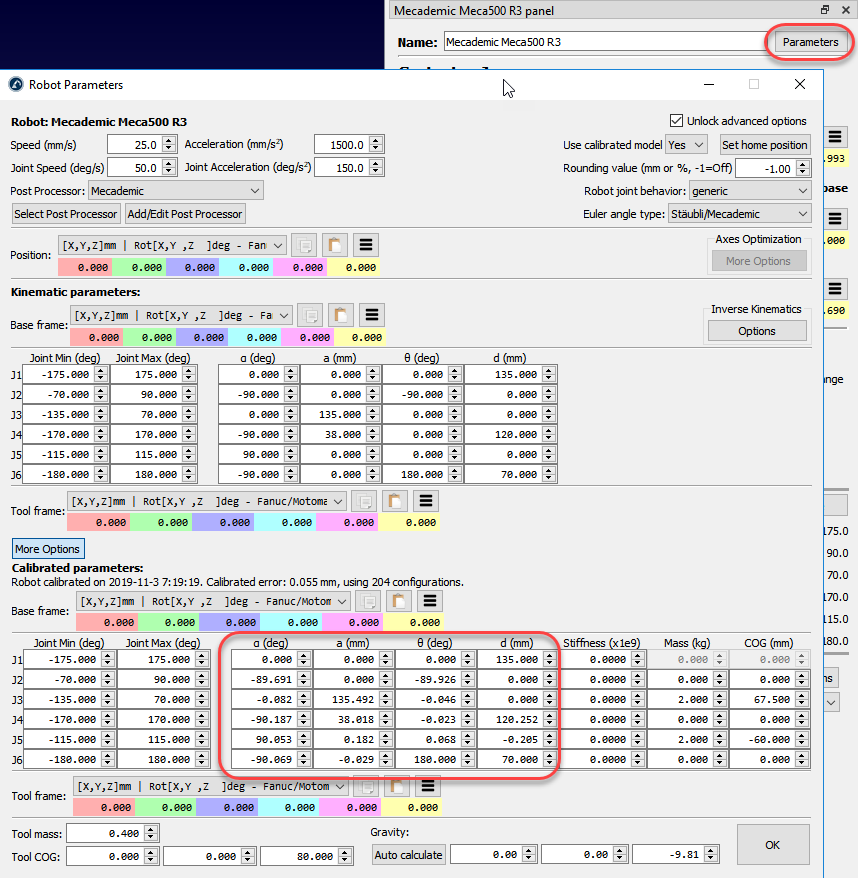
Calibrate robot parameters
You can access the calibrated parameters in the Parameters menu once a robot has been calibrated. Some robot controllers allow modifying certain robot parameters.