Rhino용 RoboDK 추가 기능
각 Grasshopper 구성요소에는사용자정의할수있는특정설정이있습니다. 설정버튼을선택하여 RoboDK 명령 (또는도구모음버튼)에적용되는기본설정을변경할수도있습니다.
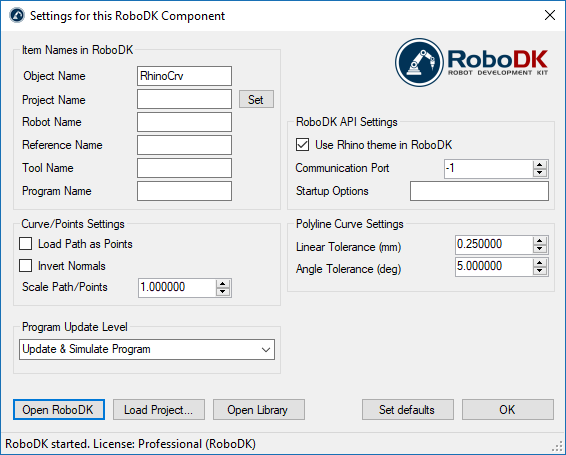
●객체이름–RoboDK에로드될곡선 / 포인트객체의이름을설정합니다. 경로가다시계산될때마다 RoboDK의객체가무시됩니다. 객체이름이컴포넌트입력 (O)으로제공되는경우에값은무시됩니다.
●프로젝트이름–사용할 RoboDK 프로젝트 / 스테이션 (.RDK 파일)의이름 / 경로를설정하십시오. 파일이이미로드되어있으면기존프로젝트를사용합니다. RoboDK에서열린프로젝트가파일이름과일치하지않으면전체경로가지정된경우프로젝트가열립니다.
●로봇이름–RoboDK에로드될로봇객체의이름을설정합니다. 로봇이름은 RoboDK 스테이션트리에서볼수있는이름과일치해야합니다. 사용가능한첫번째로봇을사용하려면이값을비워두십시오(기본값).
●좌표계이름–로봇과관련하여경로를배치할기준좌표계의이름을설정합니다. 이름은 RoboDK 스테이션트리에서보이는이름과일치해야합니다.
●툴이름–로봇과함께사용할툴(TCP)의이름을경로에따라설정하십시오. 이름은 RoboDK 스테이션트리의이름과일치해야합니다.
●프로그램이름–생성할프로그램의이름또는경로를설정합니다.
●포인트로경로로드–RoboDK에서포인트와포인트추적프로젝트로개체를만들려면이옵션을선택하십시오. 드릴링과같은제조작업에유용합니다. 곡선추적프로젝트로경로를로드하려면이옵션을선택취소하십시오.
●법선반전–계산된표면법선을반전하려면이옵션을선택하십시오. 로봇의공구방향이반전됩니다.
●RoboDK에서 Rhino 테마사용–Rhino 테마로 RoboDK를시작하십시오. 여기에는 3D 내비게이션및배경색에대한마우스동작변경이포함됩니다. 이설정은 Roino로 RoboDK를시작할때만적용됩니다. 이설정은 RoboDK의도구-옵션메뉴에서변경할수있습니다.
●통신포트–RoboDK와통신하도록통신포트를설정하십시오. RoboDK의여러인스턴스를동시에실행할수있으며다른포트를사용하는경우다른설정을사용할수있습니다. 이값을 -1 (기본값)로설정하면기본포트가사용됩니다.
●시작옵션–RoboDK를처음시작할때인수가전달되도록설정합니다. 예를들어 RoboDK를자동으로시작하려면 '/ NOSPLASH / NOSHOW / HIDDEN'을설정할수있습니다. RoboDK가표시되지않아도프로그램을계속생성할수있습니다. RoboDK API의명령섹션에자세한정보가있습니다.
●선형공차(mm) –분할곡선에대한선형정확도를점집합으로설정합니다.
●각도공차(mm) –각도정확도를설정하여곡선을점집합으로나눕니다.
버튼:
●RoboDK 열기–RoboDK에서프로젝트열기 ... 추가옵션이있는새창이열립니다.
●프로젝트불러오기…–이컴포넌트를사용하려는 RoboDK 프로젝트 (RDK 파일)를로드하십시오.
●라이브러리열기–RoboDK의온라인라이브러리를엽니다.
●기본값설정–구성요소의기본설정을지정합니다.
●확인–이설정을적용하고창을닫습니다. 확인을선택하지않으면변경한설정이적용되지않습니다.