Robot Calibration (Optical CMM)
산업용로봇은반복성은높지만정확하지는않으므로로봇보정을통해산업용로봇의정확도를향상시킬수있습니다. 로봇의공칭정확도는로봇브랜드와모델에따라다릅니다. 로봇교정을사용하면로봇정확도를2~10 배향상시킬수있습니다.
선택적으로볼바테스트(원형테스트) 또는 ISO9283 위치정확도테스트를수행하여로봇의정확도를빠르게검증할수있습니다.
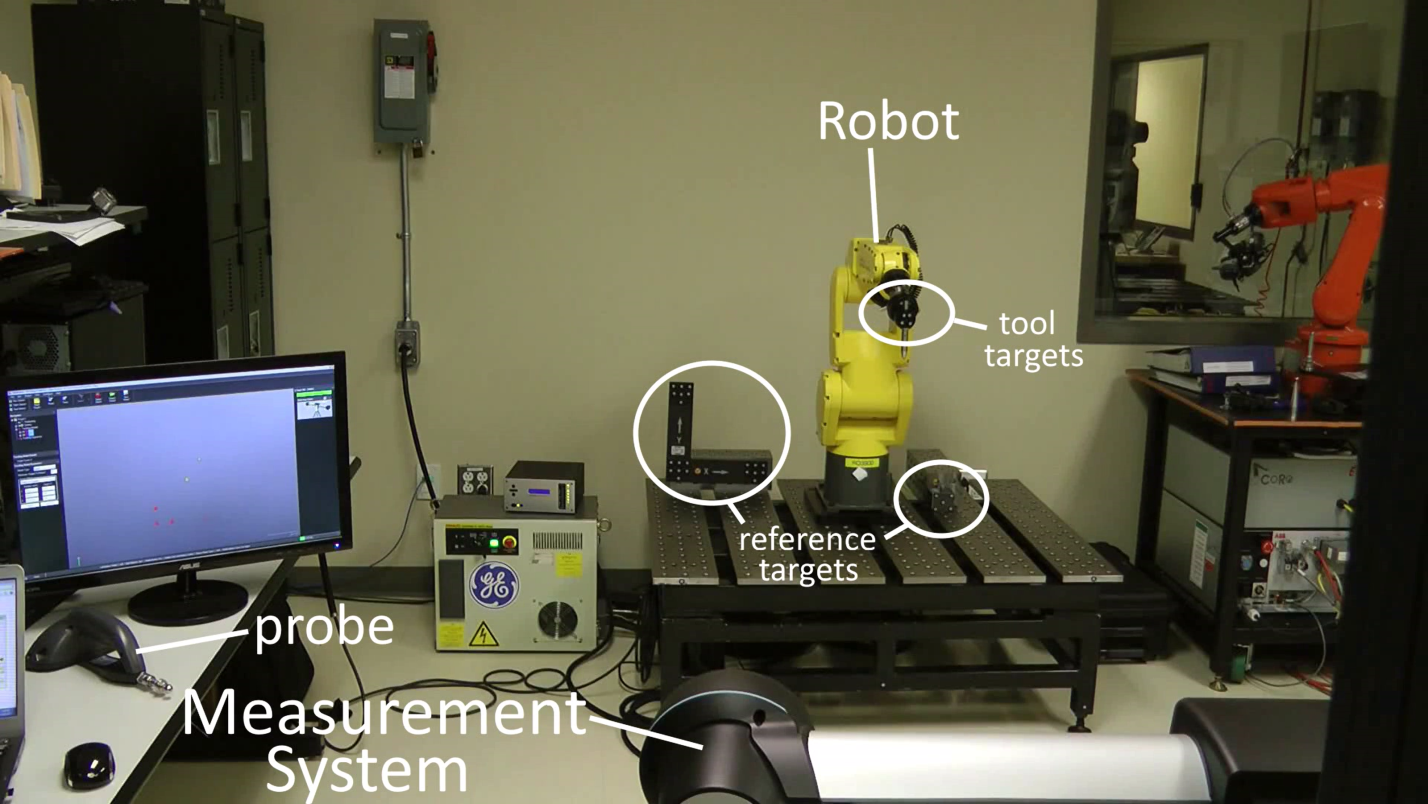
로봇을보정하려면측정시스템이필요합니다. RoboDK를사용하여로봇을보정하고정확한로봇프로그램을생성할수있습니다(프로그램필터링및 RoboDK의오프라인프로그래밍엔진사용포함). RoboDK는또한볼바테스트또는로봇밀링을통해보정전후로봇의정확도를테스트하는데사용될수있습니다.
로봇보정은오프라인프로그래밍(OLP)이라고도하는오프라인으로프로그래밍이된로봇의정확도를크게향상시킬수있습니다. 보정된로봇은보정되지않은로봇보다절대위치및상대위치정확도가더높습니다.