로봇 가공
여러분의 로봇 팔을 5축 가공기(CNC) 또는 3D 프린터처럼 사용해보십시오. NC 프로그램(G-코드 또는 APT-CLS 파일)을 시뮬레이션하고 로봇 프로그램으로 변환해보십시오. RoboDK가 자동으로 로봇 경로를 최적화하고 특이점, 축 제한, 충돌을 회피하게 해 줄 것입니다.
샘플 프로젝트를 보내주세요. 그럼 RoboDK에서 구성할 수 있도록 도와드리겠습니다!

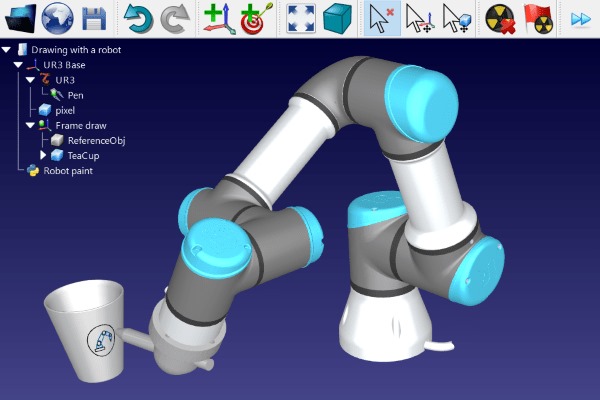
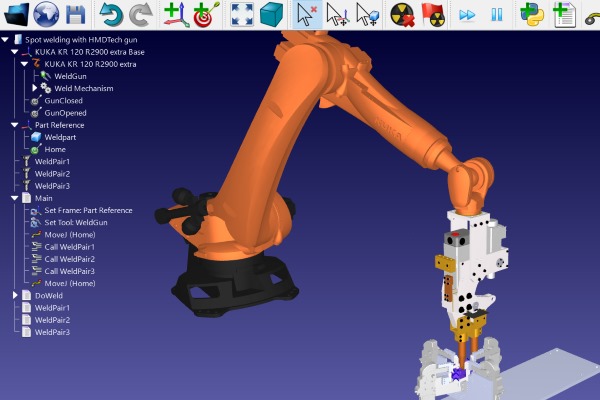
오프라인 프로그래밍 소프트웨어
산업용 로봇의 시뮬레이션과 오프라인 프로그래밍이 지금처럼 쉬웠던 적이 없습니다. 단지 몇 분만에 작업을 시뮬레이션 할 수 있는 가상의 환경을 만들어 보십시오.
어떤 로봇 제어기에 대해서도 오프라인에서 로봇 프로그램을 손쉽게 생성하세요. 더 이상 특정 회사 제품에 관한 프로그래밍을 공부하지 않아도 됩니다.
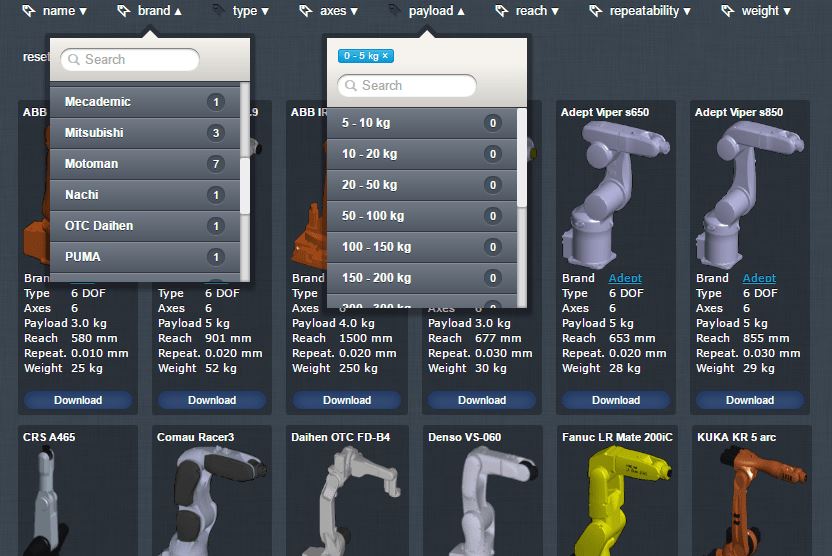
로봇 라이브러리
30개가 넘는 로봇 제조 업체의 산업용 로봇 팔, 외부 축과 작업 도구들이 포함되어 있는 확장된 라이브러리에 접속하십시오. 가공, 용접, 절삭, 페인팅, 검사, 디버링 등 다양한 작업에 어떤 로봇이든 쉽게 사용하십시오!
여러 분의 로봇을 찾을 수 없나요? 저희에게 알려 주시면 추가해 드릴게요!
로봇 정확도
사용 중인 로봇의 정밀도가 사용에 충분하지 않은가요?
정밀도와 생산 결과를 향상시키기 위해 사용 중인 로봇 팔을 보정해 보십시오. ISO9283 로봇 성능 테스트를 실행하세요. 볼바 테스트로 로봇을 인증하십시오.

로봇 프로그램을 사용 중인 로봇으로 내보내기
RoboDK 포스트 프로세서는 다음을 포함한 많은 로봇 컨트롤러를 지원합니다:
ABB RAPID (mod/prg)
Fanuc LS (LS/TP)
KUKA KRC/IIWA (SRC/java)
Motoman Inform (JBI)
Universal Robots (URP/script)
... 등 더 많은 로봇이 있습니다!