
항공기 세척 시간을 95%까지 단축하는 RoboDK 소프트웨어
Wilder Systems는 자동화된 항공기 세척을 위해 RoboDK 로봇 프로그래밍 기능을 사용합니다. 이들은 F-16 항공기와 두 대의 화낙 로봇을 사용하여 최초의 로봇 '드라이브 스루' 세차 시스템을 설계했습니다.

조형물 정밀 가공을 위한 로봇 가공
RoboDK를 통해 네오셋 디자인과 같은 아티스트가 로봇 가공을 사용하여 복잡하고 정밀한 조형물을 탁월한 효율로 제작할 수 있었던 비결을 알아보세요.
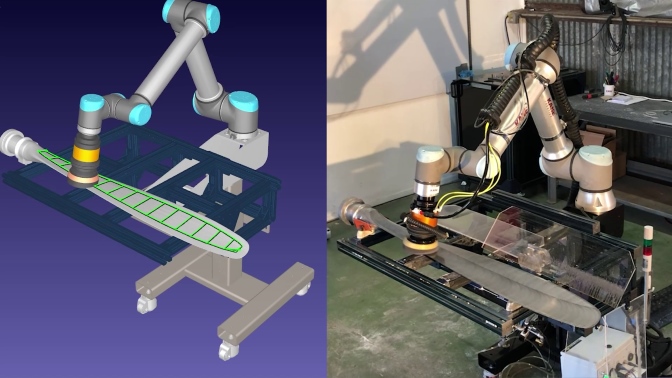
RoboDK를 사용한 궤도 연마
케인 로보틱스는 로봇 궤도 연마를 자동화하기 위해 RoboDK를 사용하여 탁월한 정밀도와 효율성으로 완벽한 표면 마감을 달성했습니다.

NASA, 다중 로봇 검사에 RoboDK 사용
NASA는 RoboDK를 통해 듀얼 로봇 검사를 구현하여 품질 관리 프로세스의 효율성과 정밀도를 향상시켰습니다.
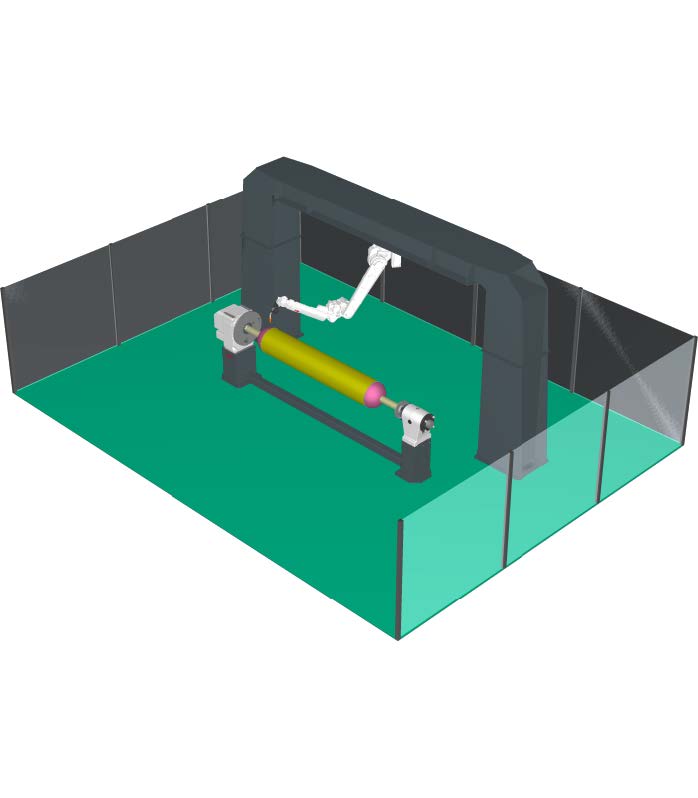
외부 축을 사용한 로봇 용접
RoboDK는 로봇 용접 자동화를 단순화하고 로봇과 용접 포지셔너를 동기화하여 자동화된 용접 워크플로우를 최적화합니다.

커스텀 API 통합을 통한 로봇 페인팅
RoboDK는 로봇 정밀도로 즉석 초상화를 제작하고 사람의 개입 없이 연중무휴 24시간 완전 자동화된 페인팅 프로세스를 지원하는 등 혁신적인 애플리케이션을 통해 정밀한 로봇 페인팅을 가능하게 합니다.