
RoboDK Software hilft, die Waschzeit von Flugzeugen um 95% zu verkürzen
Wilder Systems nutzt die RoboDK-Roboterprogrammierfunktionen für die automatische Flugzeugwäsche. Das Unternehmen hat das erste "Drive-Through"-Roboterwaschsystem mit einem F-16-Flugzeug und zwei Fanuc-Robotern entwickelt.

Roboter-Bearbeitung für skulpturale Präzision
Entdecken Sie, wie RoboDK Künstlern wie Neoset Designs die Möglichkeit gibt, mit Hilfe von Robotern komplizierte und präzise Skulpturen mit beispielloser Effizienz zu erstellen.
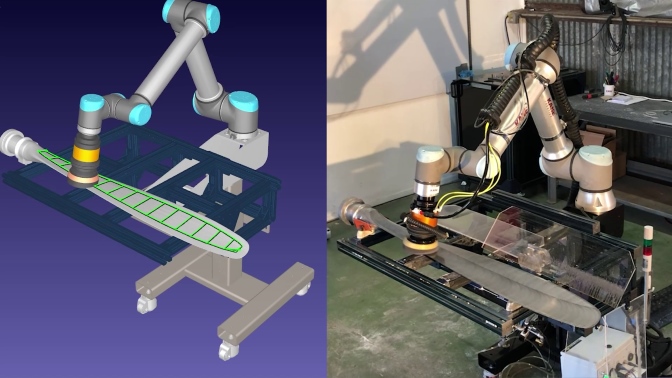
Orbitales Polieren mit RoboDK
Kane Robotics nutzte RoboDK zur Automatisierung des Orbitalpolierens mit Robotern, um eine makellose Oberflächenbearbeitung mit unübertroffener Präzision und Effizienz zu erzielen.

NASA nutzt RoboDK für Multi-Roboter-Inspektion
Die NASA ermöglichte mit RoboDK die Inspektion mit zwei Robotern und verbesserte so die Effizienz und Präzision der Qualitätskontrollprozesse.
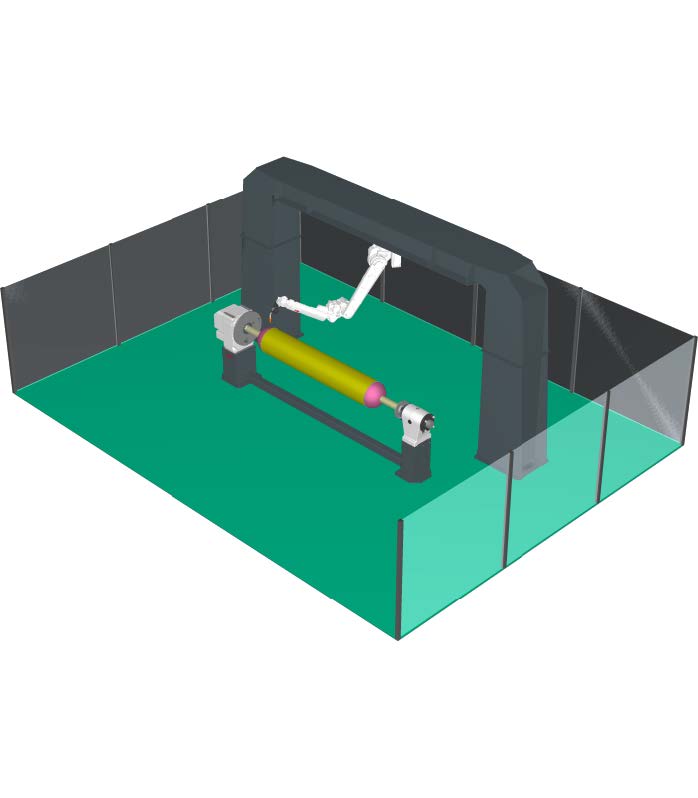
Roboterschweißen mit externen Achsen
RoboDK vereinfacht die Automatisierung des Roboterschweißens durch die Synchronisierung von Robotern und Schweißpositionierern, um automatisierte Schweißabläufe zu optimieren.

Roboterlackierung mit benutzerdefinierter API-Integration
RoboDK ermöglicht präzise Roboterlackierungen durch innovative Anwendungen, wie z. B. die Erstellung von Sofortporträts mit Roboterpräzision und die Unterstützung vollautomatischer 24/7-Lackierprozesse ohne menschliches Eingreifen.