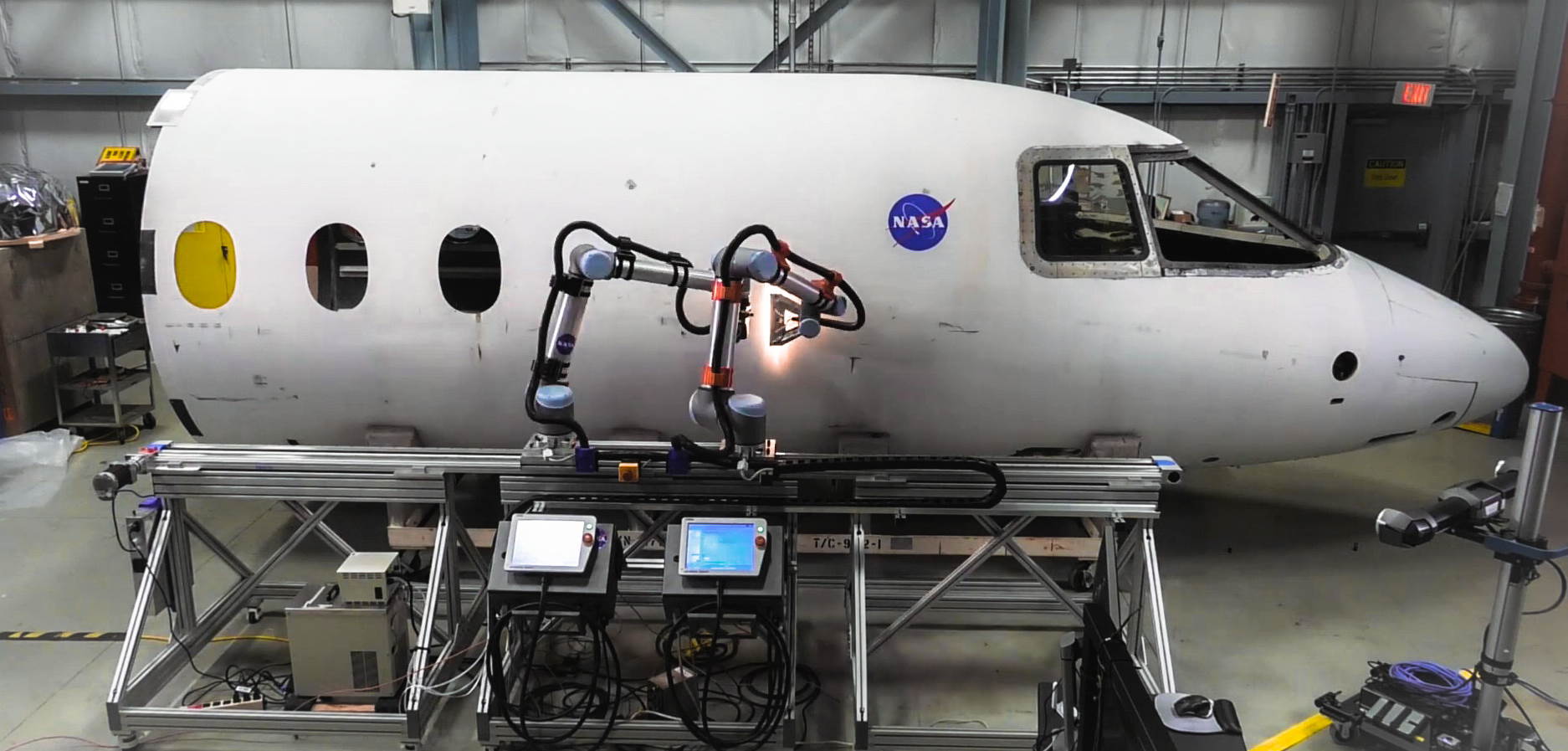
Im Jahr 2017 wurde ein Team des NASA Langley Research Centers in Virginia, USA, mit der Entwicklung eines automatisierten Inspektionssystems für Verbundwerkstoff-Rumpfstrukturen von Flugzeugen beauftragt.
Die Forscher entschieden sich für eine cobot-basierte Lösung mit einem UR10 von Universal Robots und der RoboDK-Software für Simulation und Offline-Programmierung.
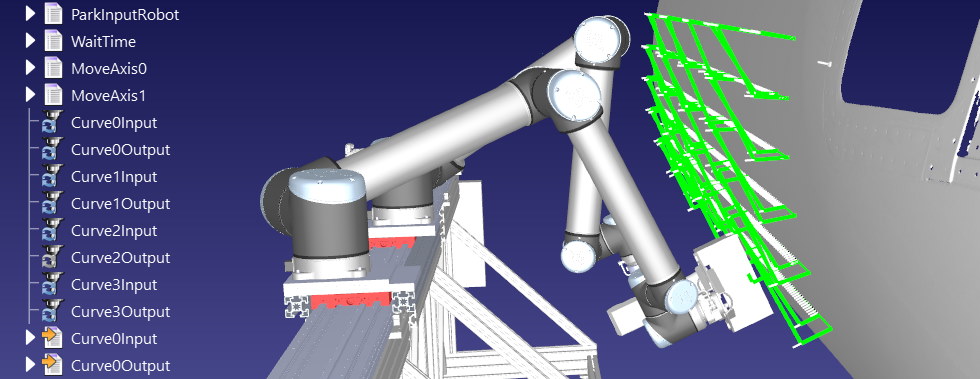
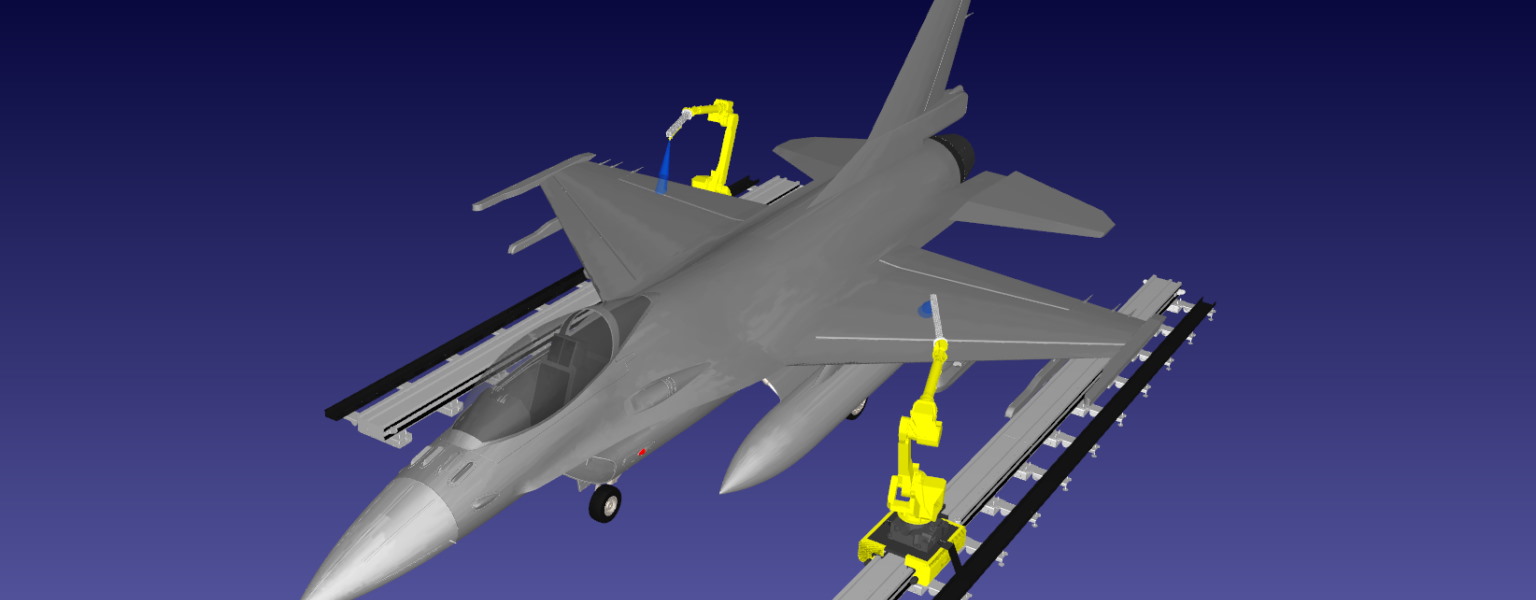
Aufbauend auf dem Erfolg des ursprünglichen Projekts präsentierte die NASA 2019 ein Multi-Roboter-Inspektionssystem das zwei synchronisierte Cobots einsetzt, um Röntgen-Tomographie-Inspektionen an Flugzeugrumpfstrukturen durchzuführen.
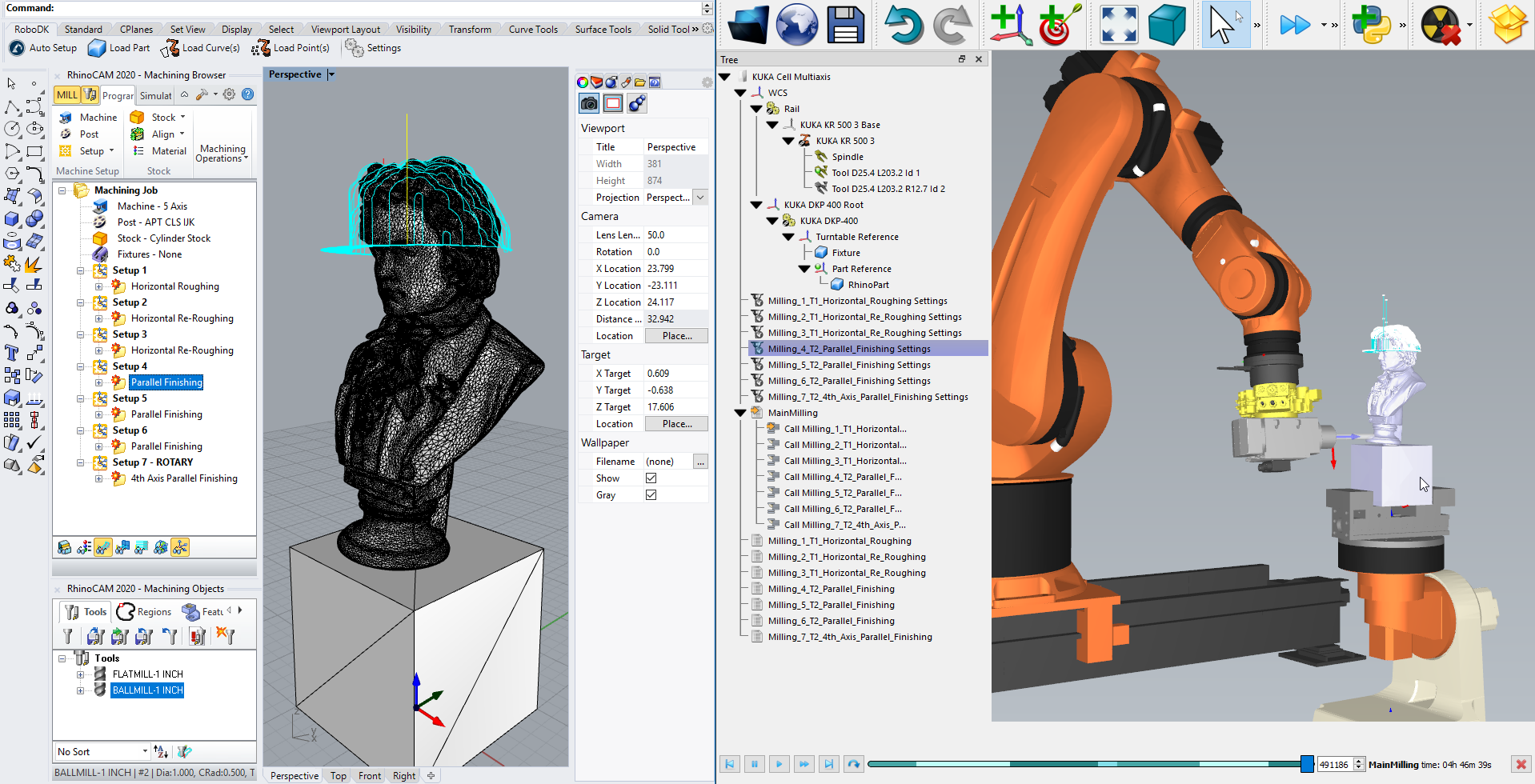
Die RoboDK-Software wurde entwickelt, um Multi-Software-Workflows zu erleichtern, und ermöglichte es den Forschern, zwei Roboter zu synchronisieren und externe Achsen in ihre Simulationen einzubeziehen.