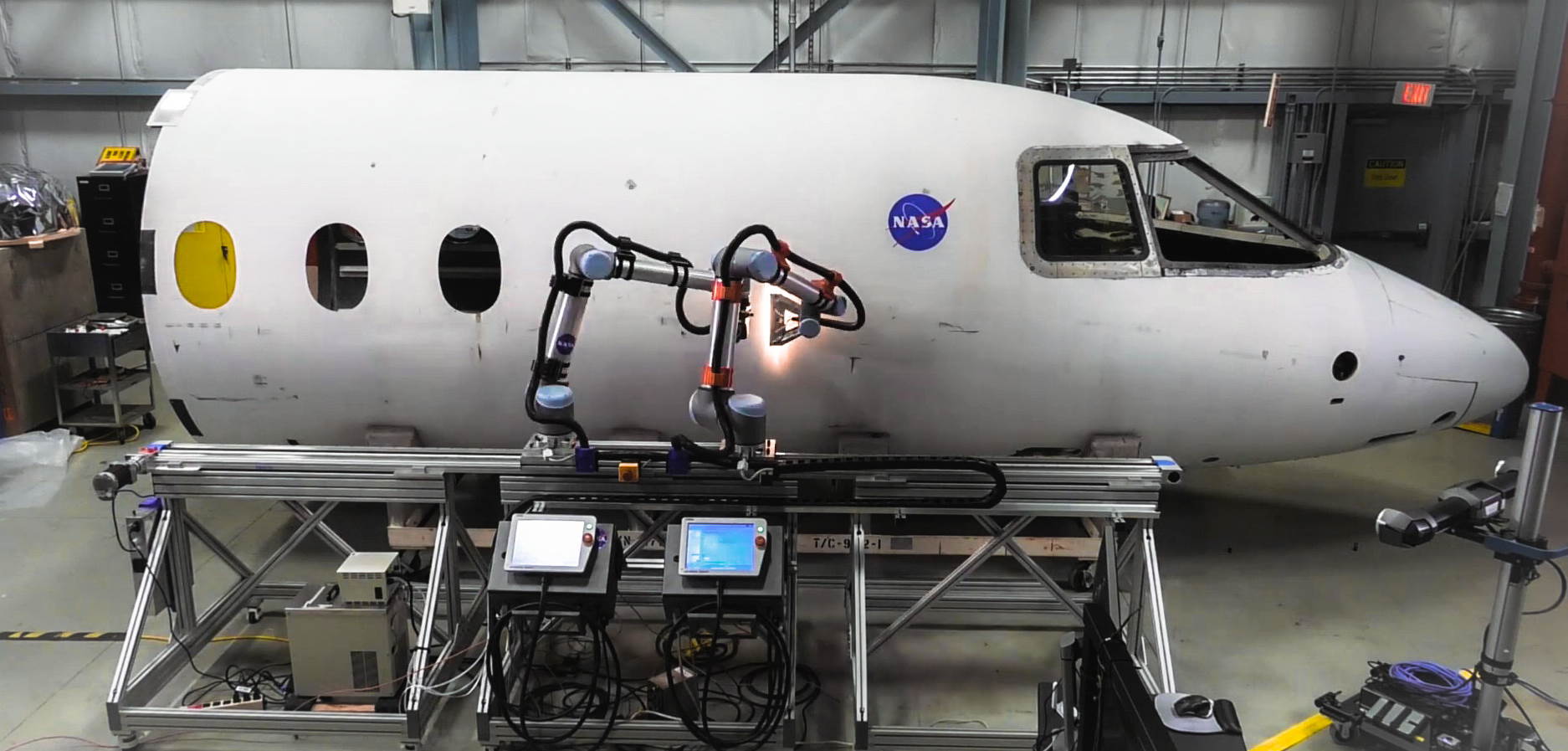
En 2017, un equipo del Centro de Investigación Langley de la NASA, en Virginia (Estados Unidos), recibió el encargo de desarrollar un sistema de inspección automatizado para fuselajes de aviones fabricados con materiales compuestos.
Los investigadores optaron por una solución basada en un cobot que utilizaba un UR10 de Universal Robots y el software RoboDK para simulación y programación fuera de línea.
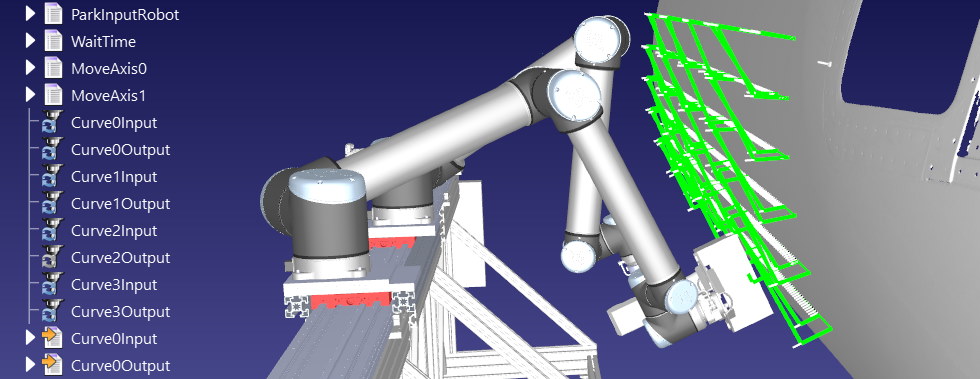
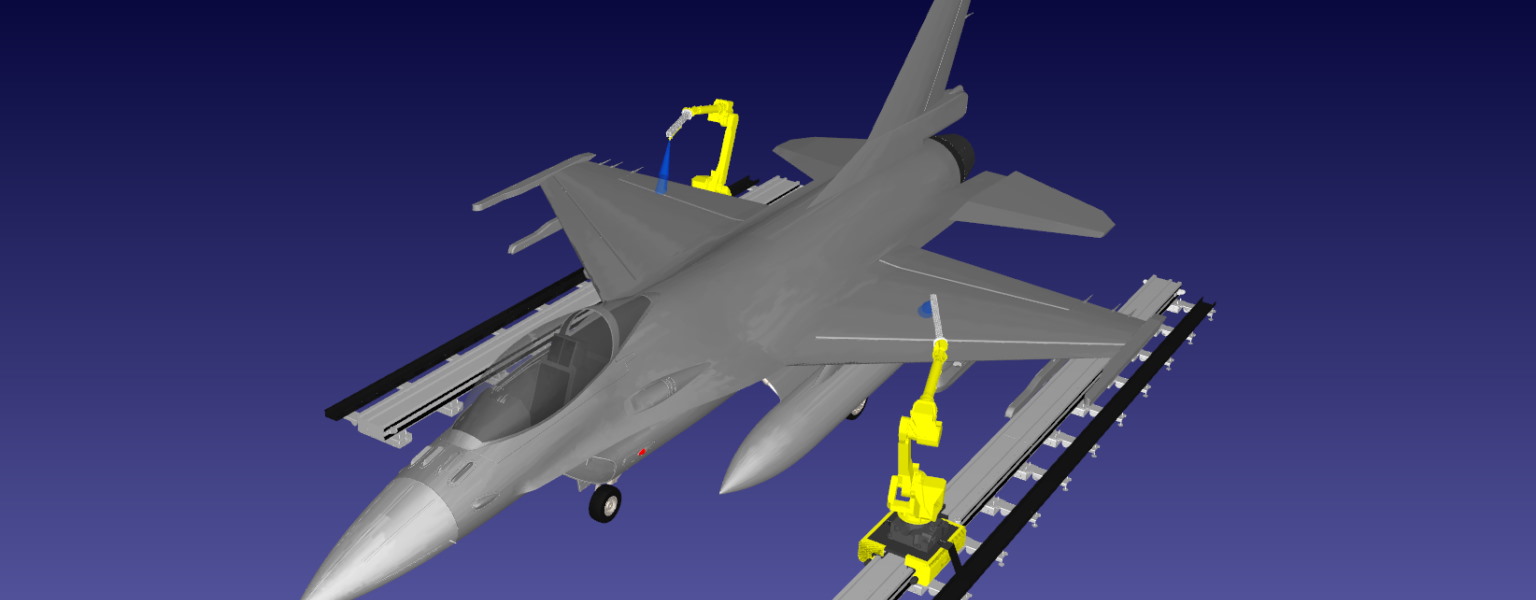
En 2019, aprovechando el éxito del proyecto original, la NASA dio a conocer un sistema de inspección multirobot que utiliza dos cobots sincronizados para realizar inspecciones por tomografía de barrido lineal en fuselajes de aviones.
Diseñado para facilitar los flujos de trabajo multisoftware, el software RoboDK permitió a los investigadores sincronizar 2 robots e incorporar ejes externos a sus simulaciones.