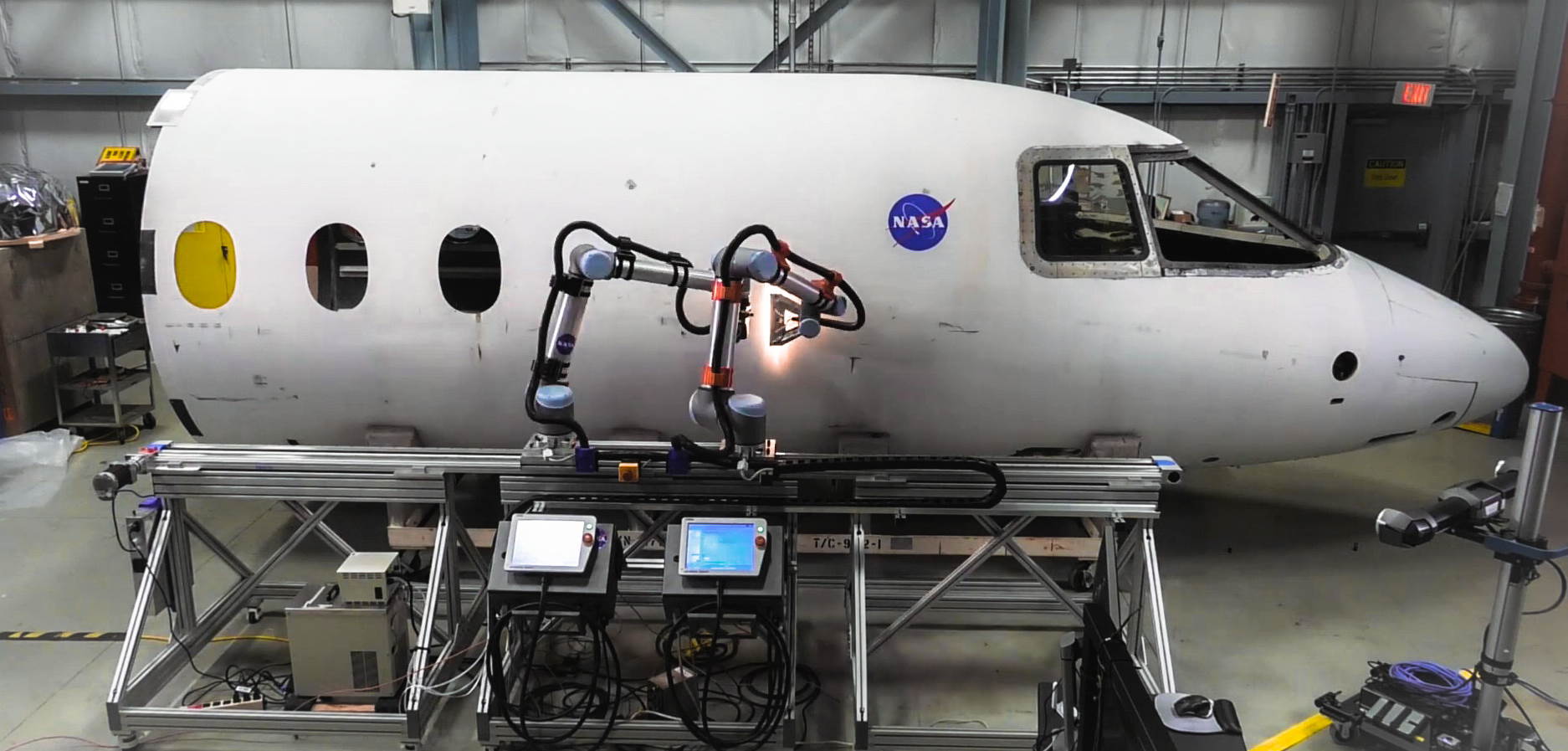
In 2017, a team at NASA's Langley Research Center, in Virginia, USA, was tasked with developing an automated inspection system for composite aircraft fuselages.
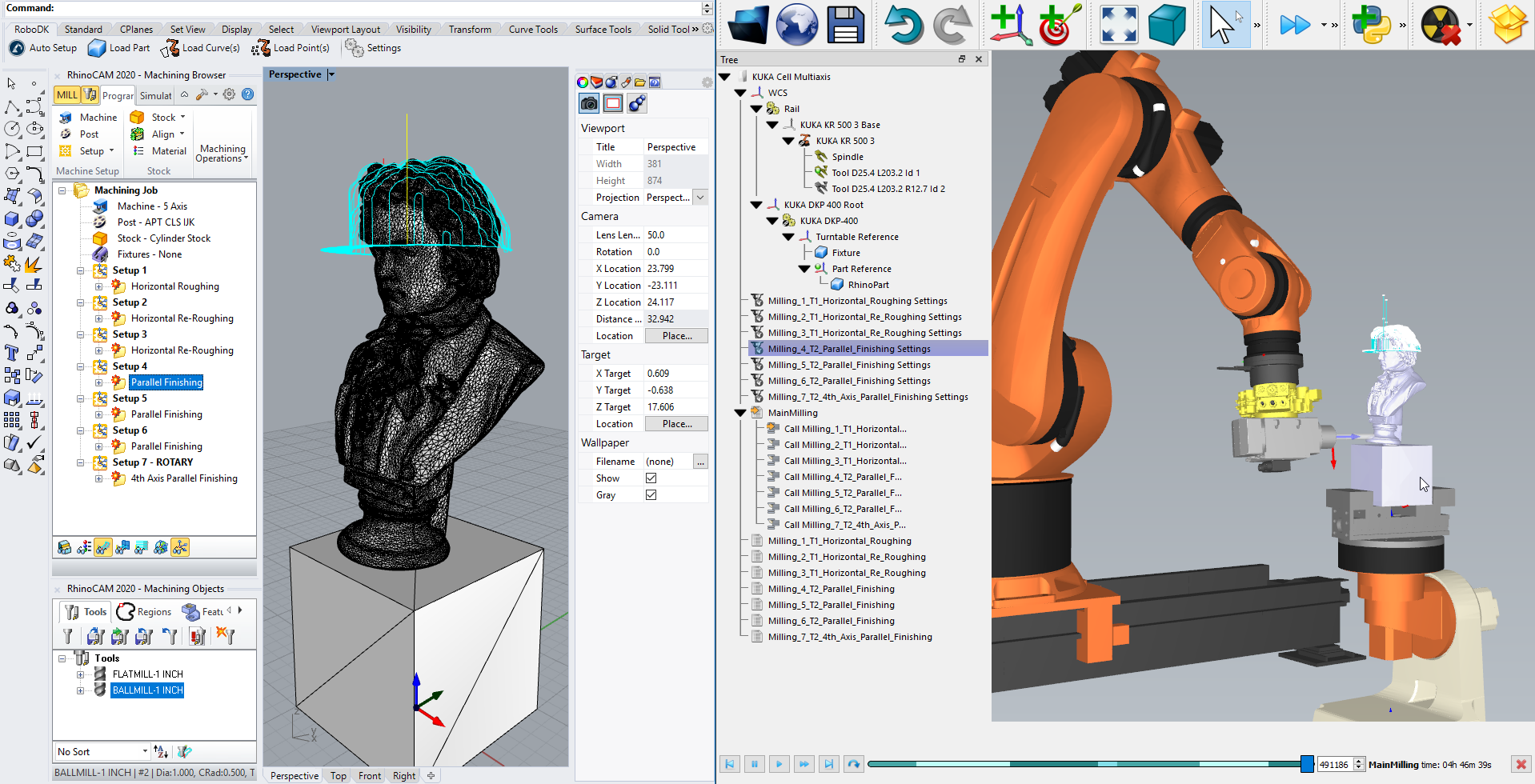
The researchers settled on a cobot-based solution using a UR10 from Universal Robots and RoboDK software for simulation and offline programming.
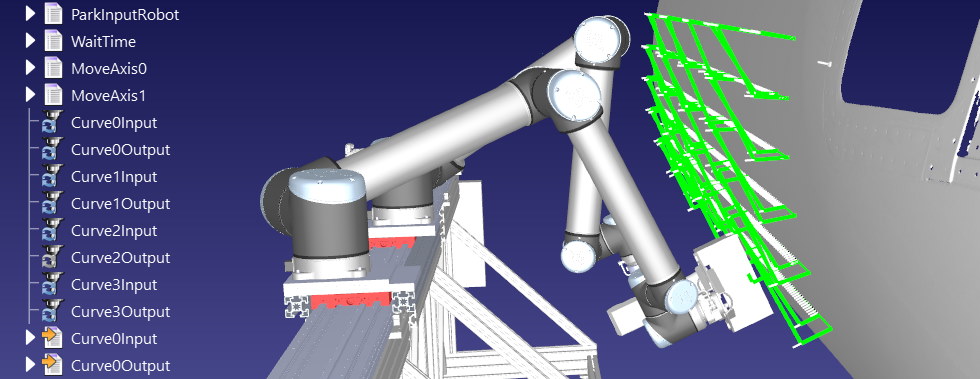
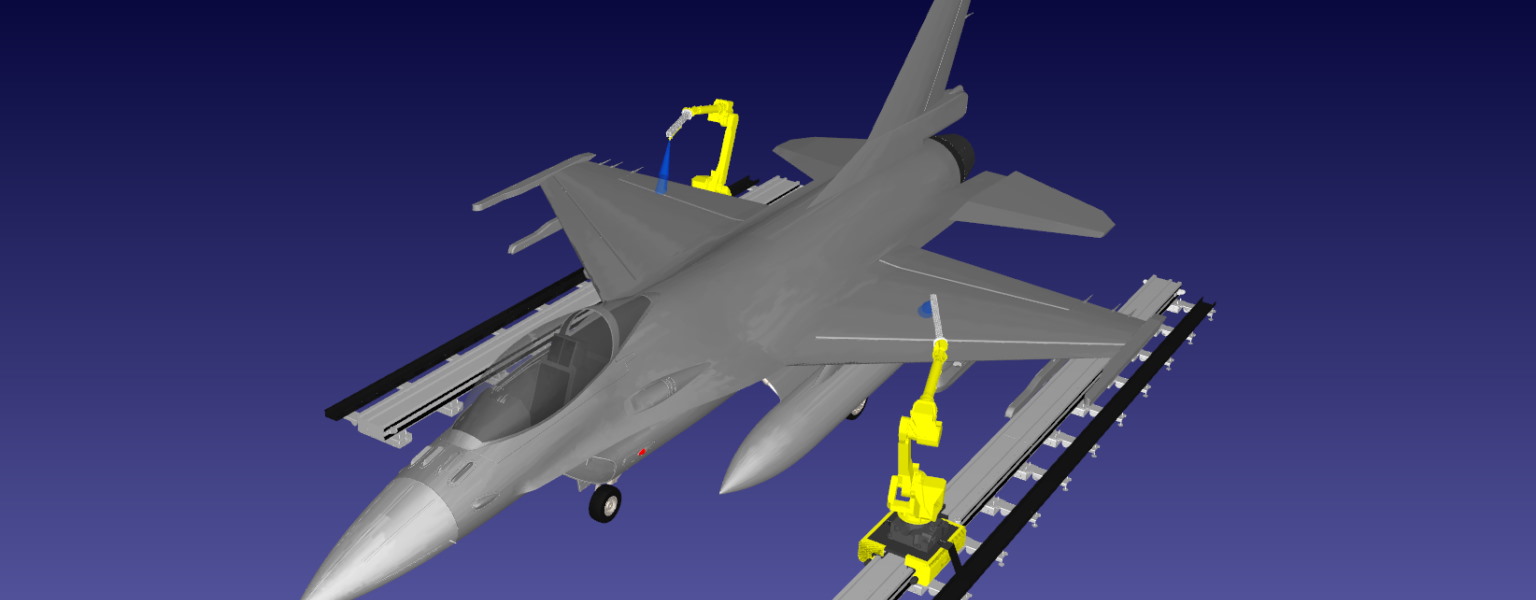
In 2019, building on the success of the original project, NASA unveiled a multi-robot inspection system that uses two synchronized cobots to perform line scan tomography inspections on aircraft fuselages.
Designed to facilitate multi-software workflows, RoboDK software enabled the researchers to synchronize 2 robots and incorporate external axes into their simulations.