All-in-one solution
Compact size, cost-effective, easy setup
RoboDK API features included
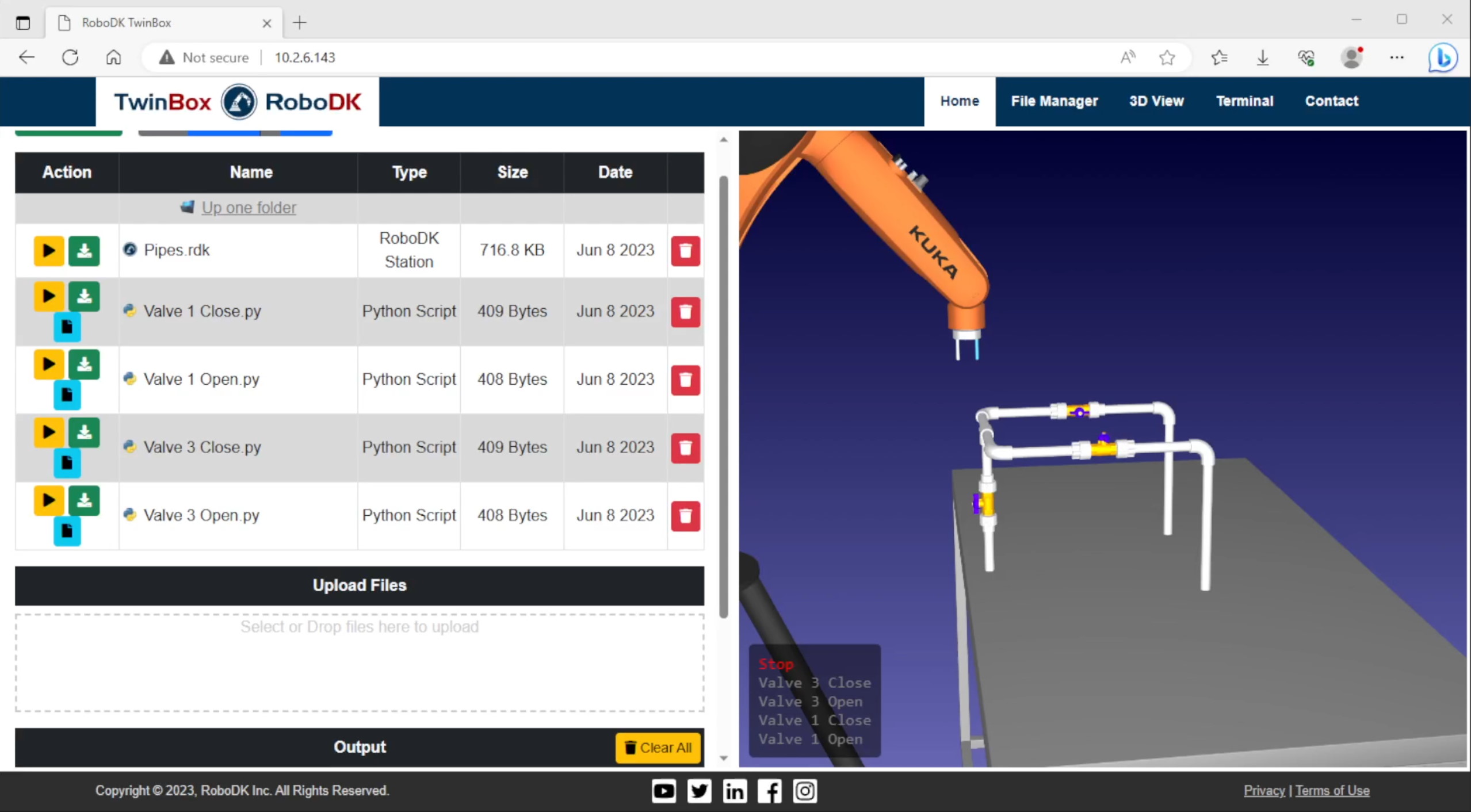
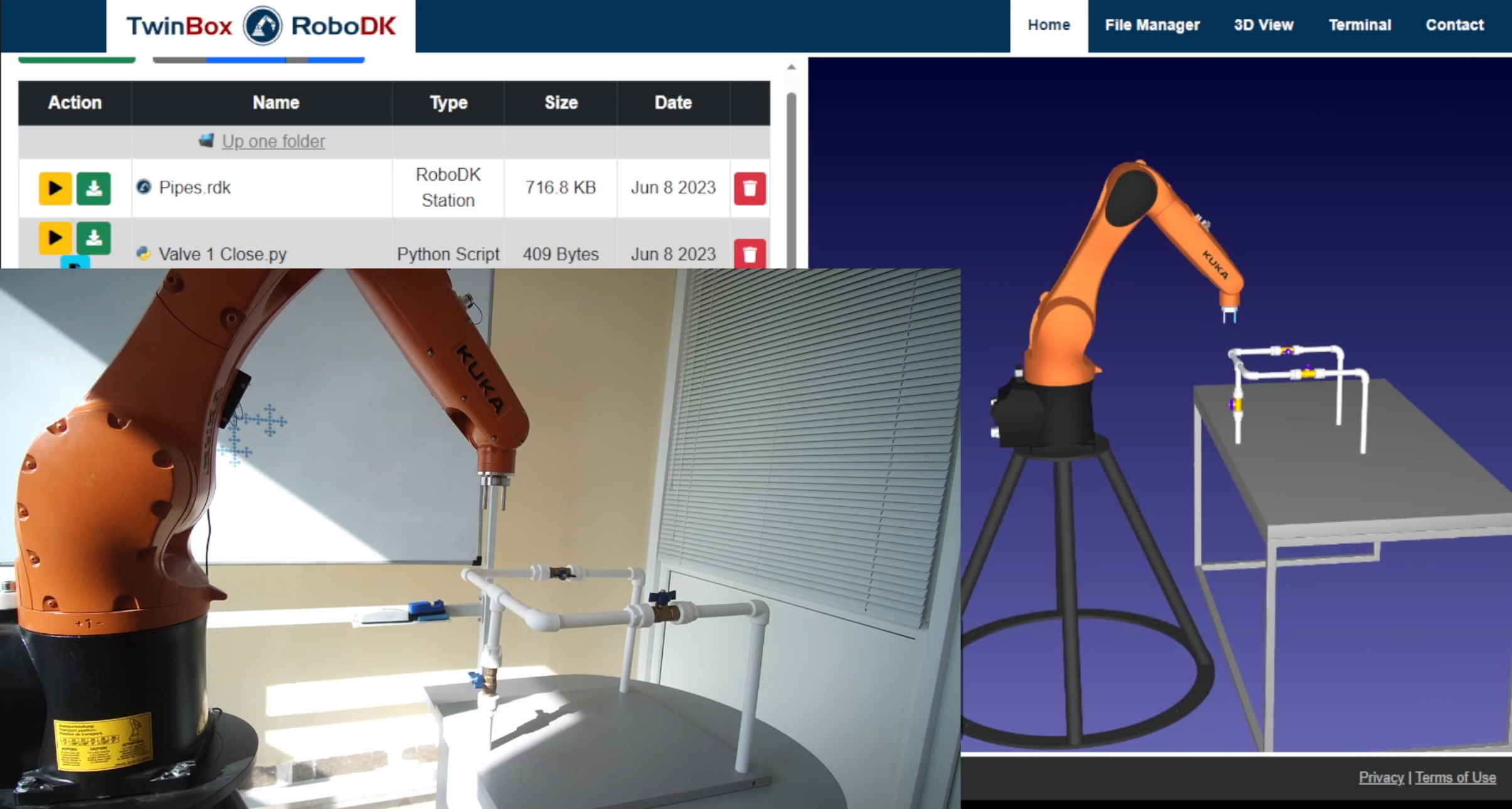
Controlled via a web browser
Real-time access from anywhere in the world
Full control over robots, devices and sensors
Compact size, cost-effective, easy setup
RoboDK API features included
Controlled via a web browser
Real-time access from anywhere in the world
Full control over robots, devices and sensors
Remote access through a web browser
Space-efficient: No need for a local keyboard, mouse or display
Connect custom devices (cameras, sensors, ...)
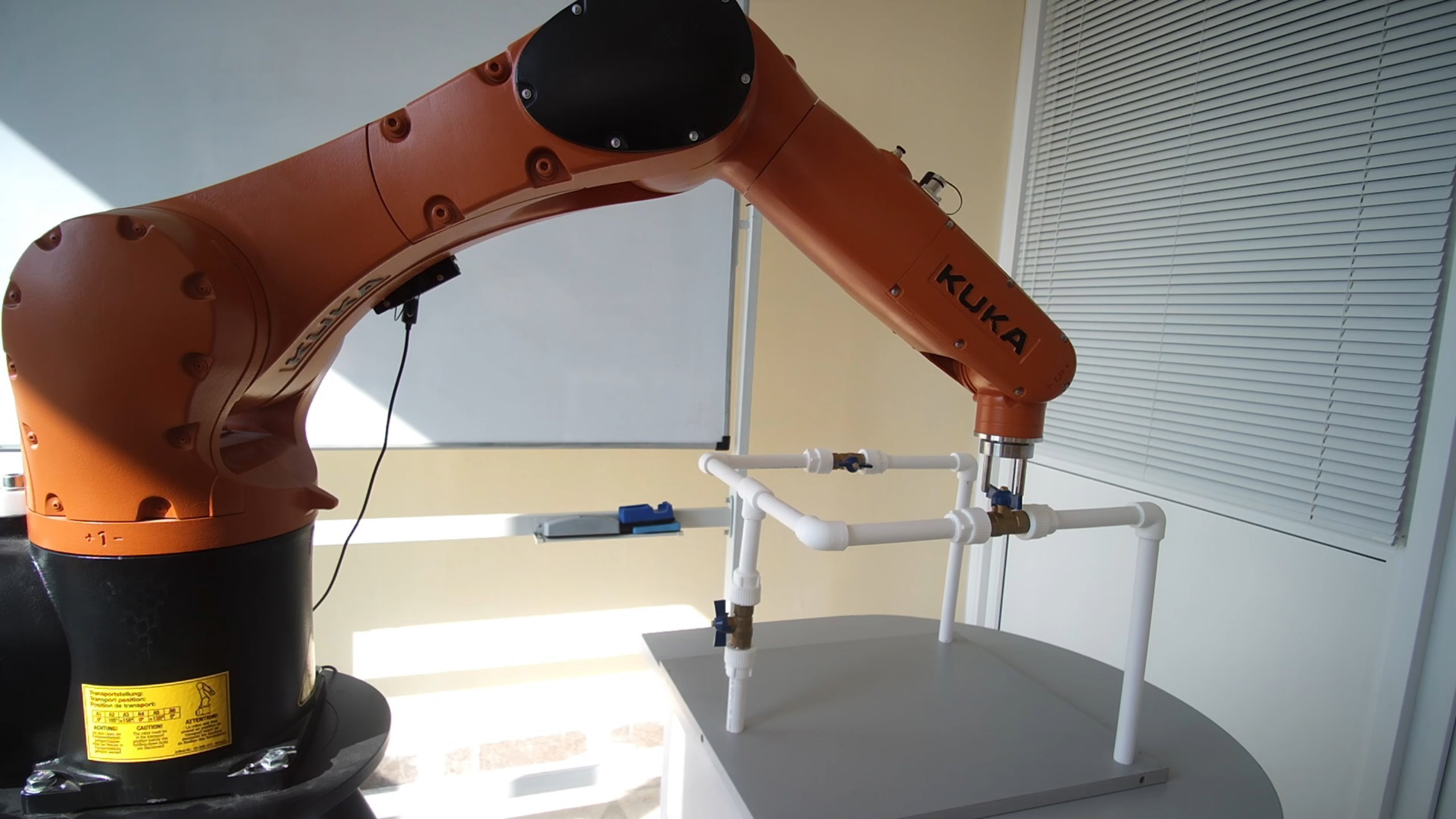
Support for multiple robots
Build your project using RoboDK Desktop
Load the station using your browser
Execute the robot program via RoboDK TwinBox web interface
Adjust the program if needed
Support of multiple operating systems: Windows, Linux Debian or Ubuntu
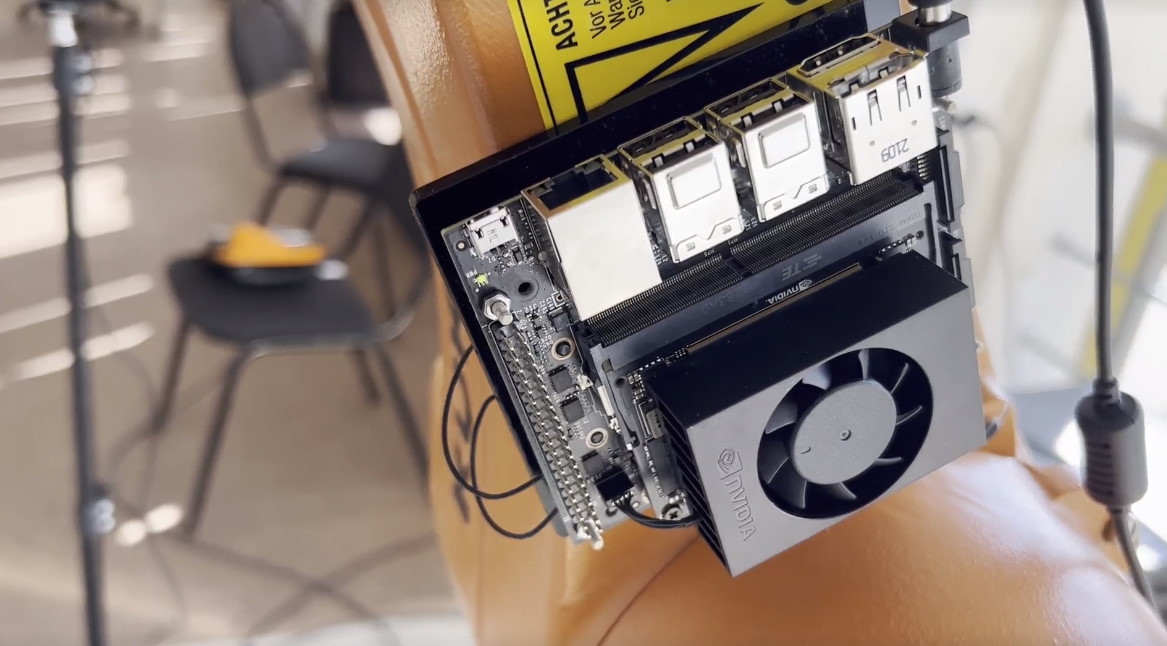
System requirements: Intel x86-64 platforms, ARM
Dedicated builds available: Nvidia Jetson, Raspberry Pi
Generate programs for your robot controller with just a few clicks
Easily model and synchronize additional axes






