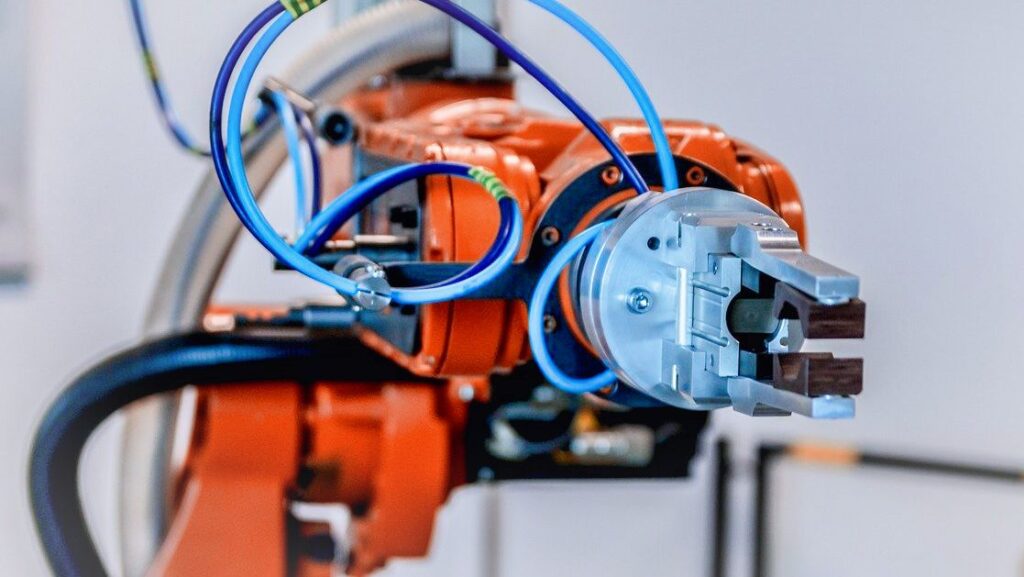
What Is Robot 3D Printing — and Is It the Right Additive Manufacturing Solution for Your Business?
Robot 3D printing combines the flexibility of multi-axis industrial robotics with the endless possibilities of additive manufacturing. But is robot […]