Robotic welding is now a tried and tested solution for manufacturers looking to improve their welding process. As the shortage of skilled workers continues to rise, automation is increasingly an excellent solution.
But programming welding robots can be a challenge, especially when you don’t have experience deploying and using robots.
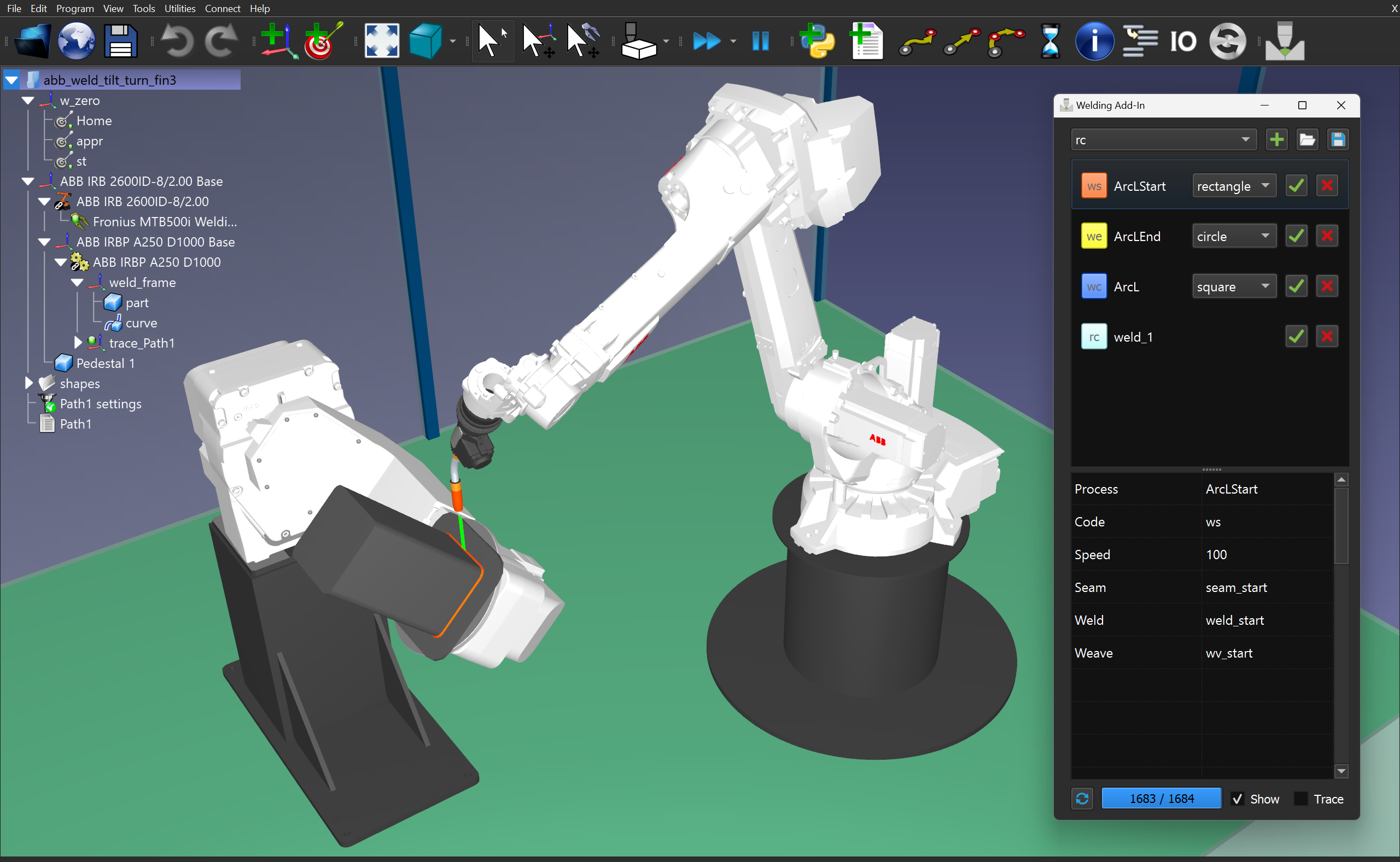
Enter the new Welding Add-in for RoboDK!
Our new Add-in makes programming your welding task easier than ever before. With a few simple steps, you can set up powerful welding programs by setting a few simple parameters.
Here’s what you can expect from the Welding Add-in and how you can get the most from it…
The Need for Simpler Robotic Welding Programming
According to a US figures, there was a need for around 375,000 welding professionals to fill job openings in 2023. But, finding these professionals is becoming an increasingly tough job for manufacturing companies.
There is a severe shortage of welding talent in many countries right now. We can attribute this to factors such as the aging workforce, deindustrialization, and a preference for knowledge-based work among young adults.
The impact of this shortage is putting a strain on many companies. It leads to longer lead times for work, production problems, and higher manufacturing costs for businesses.
Adding robots to your welding process can help to bridge the gap left by the lower number of human welders. However, the problem is that most welding professionals have little to no experience with robots.
Human expertise is vital for creating an automated welding process. But welders might struggle to work with robots even when they are keen to learn.
This is why easy programming options are so necessary.
7 Key Features of Welding with RoboDK
When combined with RoboDK, the new Add-in offers some valuable features to help you quickly set up a powerful welding task.
Here are 7 key features you can use:
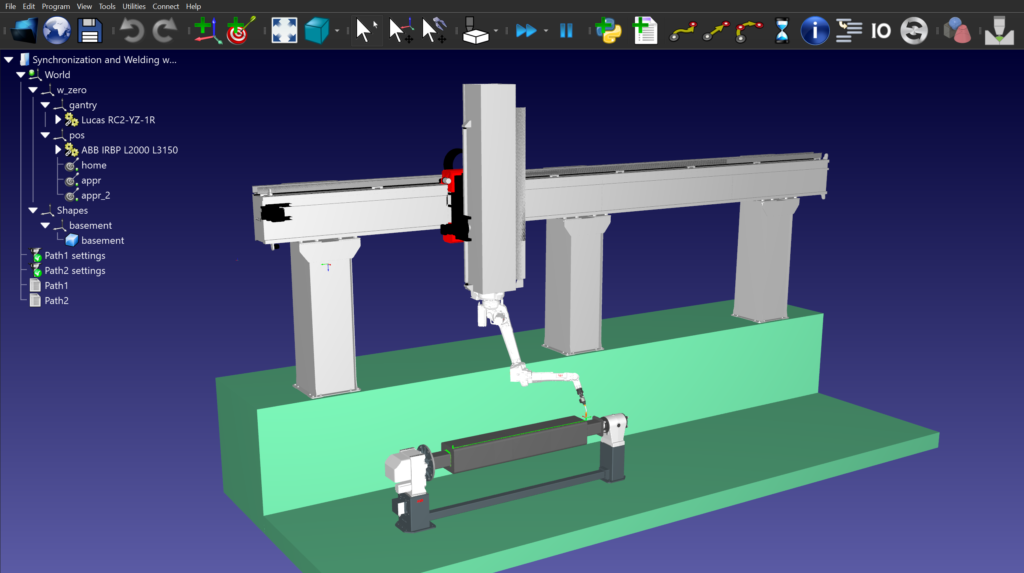
- Welding Simulation — Welding is an extremely common task, particularly in the automotive industry. RoboDK’s capabilities allow you to create precise, technologically adequate and collision-free welding trajectories.
- Component Simulation — RoboDK allows you to load your robot as well as all the other components of your application into the simulation environment. You can also create other shapes with the Shape Add-in.
- Trajectory Planning — The Add-in helps you create collision-free paths between subsequent points in your welding task. You can simply use the collision detector or you can autogenerate new trajectories using our AI planner.
- Predefined Weld Profiles — You can create multiple welding profiles for different welding tasks with predefined modes and visualization settings.
- Add Custom Code Instructions — Making changes to your program to suit your specific setup is very easy when you add custom code instructions.
- Cycle Time Estimation — An extremely useful feature of RoboDK is that it can estimate the cycle time for a particular task, helping you to continuously improve the efficiency of your program.
- Robot Program Generation — While simulation alone can be useful for planning your robot program, the real power of RoboDK comes when you use it to generate your robot program. When it’s set up with your specific robot model, you can do this at the touch of a button.
These features — and many more within RoboDK — offer a robust robot programming interface for your welding tasks. Additionally, RoboDK’s integration with gantry systems from Lucas France enhances its capabilities further.

How to Use the New RoboDK Welding Add-in
To use the RoboDK Welding Add-in, first ensure that you have the core software properly installed and running on your device.
You can get the latest version of RoboDK from our download page
Then complete the following steps to start your welding application:
- Start by downloading the Add-in for free from our Add-in Marketplace. You can also load it directly in RoboDK by activating the App Loader.
- Load the necessary models, robots, and tools into your simulation. Remember that you don’t need to include all objects from your robot’s physical environment. Only include those components that will affect the welding task.
- Set up your tool (TCP) in RoboDK with the welding gun. There are several of these models in the Robot Library, or you can use your own
- Create toolpaths and use the Welding Add-in to add specific welding commands.
- Simulate the robot program and identify which aspects of your application needs improvement.
- Double-check for any collisions that may have been generated using RoboDK’s collision detector.
- Generate the robot program and send it to your welding robot.
- Test the generated welding program on your robot. Note any changes you need to make to your program and update them within RoboDK.
- When you have debugged the program fully, you can put the welding robot into production.
- Plan to come back to your robot application after some time to see which aspects of the welding task you can improve.
These are just the overall steps to using the Welding Add-in. For a more detailed tutorial, go to our dedicated page on the documentation site
What You Can Expect With the New Add-in
If you are using robotics to improve your welding application, the new Add-in could be a game-changer.
If you are already an experienced user of RoboDK, you can expect to increase your productivity when programming welding tasks. This can help you reduce the time to program a new welding procedure and have more ways to improve existing welding.
If you are new to RoboDK and welding is your first robotic application, the Welding Add-in will help reduce the time and effort you take to get used to robot programming. With this application under your belt, you can then create even more impactful applications.
Which welding tasks would you like to automate? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.. Also, check out our extensive video collection and subscribe to the RoboDK YouTube Channel



