
Tubes and pipes require cutting and milling in many industries. However, the conventional way to cut tubes is fraught with problems.
Quality issues and a lack of repeatability are common sources of frustration. Therefore, if you want to accurately cut tubes, you must do a few things first.
You either need to invest in large, expensive cutting machines or risk inconsistency by performing the job manually.
Meanwhile, one company in Finland has developed a system that makes tube and pipe cutting easy and quick with robotics.
With the help of RoboDK’s offline programming software, they have found a way to seamlessly turn CAD models into accurately milled pipes.
The Challenges of Conventional Tube Cutting
The conventional approaches to cutting and milling tubes are far from ideal.
Common options for cutting pipes include heavy-duty power cutters, gas cutters, band saws, or even grinders. These certainly perform the job of cutting the pipe. However, their accuracy and consistency are generally low.
As a result, this lack of consistency can be very problematic. For instance, With band saw cutting; incorrect tension applied by the human operator can lead to inconsistent wear of the cutting blade.
In addition, there are other quality issues that often arise as well. These issues include crooked cuts, wandering blades, poor cutting repeatability, excessive burrs on metal tubes, and other defects.
A common alternative for improving the accuracy and consistency of pipe cutting is to use a laser cutting machine. These machines are often huge, expensive, and inflexible. For instance, a particular machine might be suited to cutting the profile of a tube. However, it will likely be unsuitable for tasks like milling a window into the side of the tube.
As a result, these challenges mean that conventional approaches to tube and pipe cutting are often too inflexible. They just don’t suit the needs of those companies that are not cutting huge numbers of the same type of tube with the same type of cut every day.
Introducing Sunrob Robotics
Sunrob Robotics is a provider of advanced robotic applications based in Lappeenranta, Finland.
Moreover, they specialize in a variety of different solutions. These solutions include robotic packaging, 3D printing, machine vision, and other robotic services. Since their first robotic application back in 2006 — a machine tending application for a metal lathe — Sunrob Robotics has been providing solutions to a wide range of industries. For example; the metal industry, the food industry, and the wood industry.
We previously introduced one of the team’s applications when we wrote about their robot milling setup for creating custom-built ice hockey sticks.
Meanwhile, the team at Sunrob Robotics have turned their engineering minds to the problems associated with accurately milling tubes and pipes.
Sunrob’s Flexible Robotic Milling System
The team knew that they needed to create a system that was easy for customers to deploy and even easier for them to program.
Tube and pipe cutting is required in a wide range of industries. These industries include; manufacturing, oil and gas, civil engineering, and more. They needed people who were not highly experienced robot integrators to be able to use the system; ideally out of the box.
For this reason, they designed the solution as a ready-to-use, self-contained unit. The robotic system is mounted inside a shipping container. The container has a 7-meter wide automatic door so that a 6-meter tube fits into it.
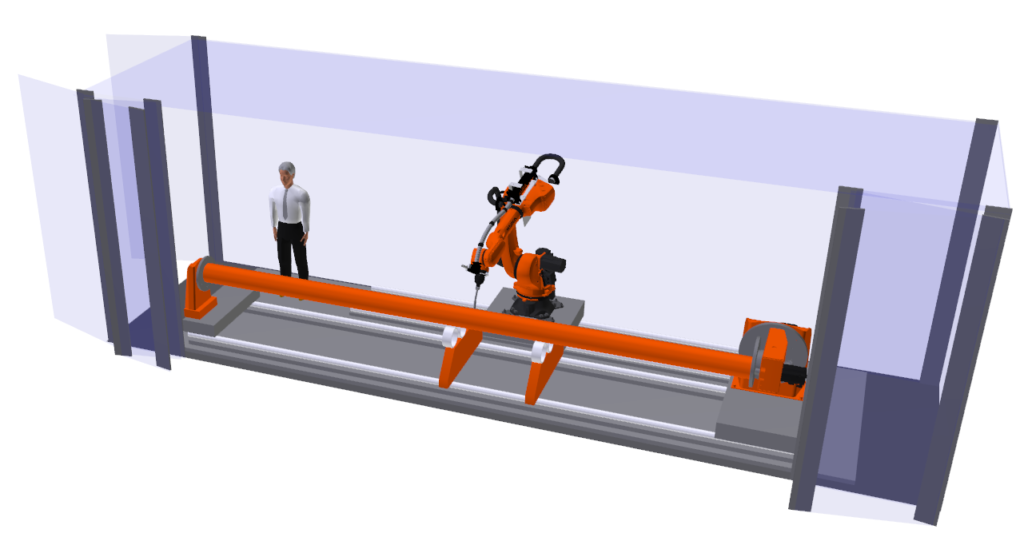
Their system is designed to be flexible and can be used with different types of tubes. For example, this video shows the system with a milling tool and a plastic tube. However, it can also be useful for a plasma or laser cutter and a stainless steel pipe.
The Team’s Robotic Setup
The team at Sunrob Robotics integrated a few key hardware and software components to make the tube cutting system possible.
Here are the basic elements that they combined:
The Robotic Hardware
Sunrob Robotics specializes in KUKA robots; the core of the robot cell is a KUKA KR 120 2500 Pro.
This is a compact, high-payload robot (120kg) from KUKA’s Quantec Pro line of robots. It is specially designed to meet the needs of various industries. As a result, this makes it suitable given the large number of industries that Sunrob Robotics services.
The core hardware components of the system are:
- The KUKA robot
- The required cutting head (in the case of the video demo above, this was a milling head)
- The automatic doors of the shipping container that perform the same job as a safety fence
The Software Setup
The team wanted to make sure that programming was quick and intuitive for any user that was using the tube cutting system.
For this reason, they based it around RoboDK; which provides an accessible robot programming interface even to new robot users.
The core software components were:
- RoboDK for offline programming of the robot
- Fusion 360 as their chosen CAD program (they generated the cutting paths in Fusion360 and sent it to RoboDK)
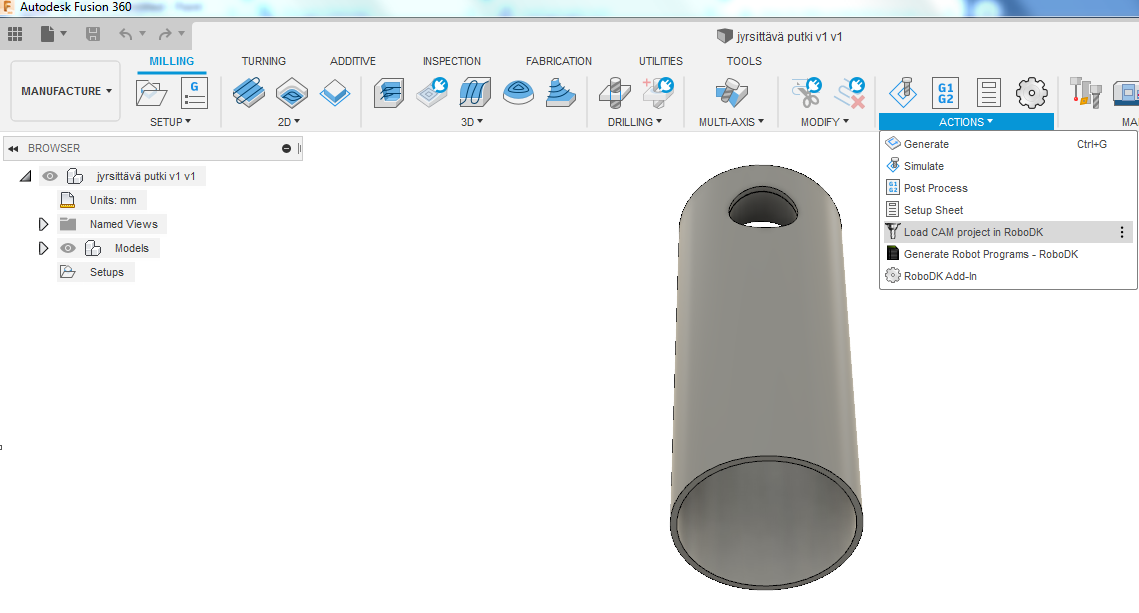
Fusion 360 integrates seamlessly with RoboDK through its native plugin. We have previously discussed why this CAD program is a great option when working with flexible milling applications like this one.
What’s Next for Sunrob Robotics
The team at Sunrob Robotics has developed their solution for agile robot milling of tubes and pipes. Now, what’s next?
Sami Pörsti CEO of Sunrob explains that they already have their next application planned.
He says:
“We are already setting up the next system for plasma cutting and welding with the same technology. This will also be in a shipping container.”
What challenges do you often encounter with tube and pipe cutting? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.



