Artists often introduce innovative possibilities for robotic technology that other users don’t consider such as robotic drawing.
Whenever an artist uses a robot in their project, it raises new questions that apply to many conventional robot applications like…
How do you maintain “the human touch” when fabricating with robots?
Can a robot create something that is both consistent and pleasingly random?
What new designs are possible by using a robot instead of manual fabrication?
Artists often like to use RoboDK because its simple interface is ideal for less experienced robot users. In the past, we have reported on projects including portrait painting with a KUKA robot, robot-fabricated art installations, and supersized 3D printing for interior design.
This latest artistic application of RoboDK causes us to question the very nature of robotic art.
The Question of the Human Touch in Art
What’s the difference between robot-created art and art made by human hands?
In recent years, the lines between art and technology have been blurred somewhat with the rise of art created by artificial intelligence systems. This has led many people to question whether AI art is really art at all if it wasn’t created by a human. The jury is still out on this question.
When it comes to painting and drawing, one factor that comes into effect is the inherent inconsistency of humans. Even the most skilled painters in the world would paint the same art piece slightly differently every time.
These random — but not completely random — variations are part of what makes art pleasing to look at.
Robots, however, are completely consistent.
When a painting robot in an automotive factory draws a logo on the side of a car, it will be the same every time.
How can you create art with a robot that is not so consistent that it appears “manufactured”?
Introducing… Artist Nicholas LiCausi and Robotic Drawing
One artist who is addressing these issues is Nicholas LiCausi.
Nicholas is a designer and artist from the Tulane School of Architecture in New Orleans, Louisiana. There, he works as a Director of Fabrication where he oversees the operations of several digital laboratories, including 3D printing and CNC.
His work covers a broad range of mediums and topics. His past projects include a virtual reality art exhibition, a parklet constructed of recycled pallets, and a conceptual design that reimagined the city metro as a rollercoaster.
Nicholas’s work into robotics uses the same technology that is usually used with manufacturing tools to instead manipulate the tools of artists, specifically paintbrushes and pens.
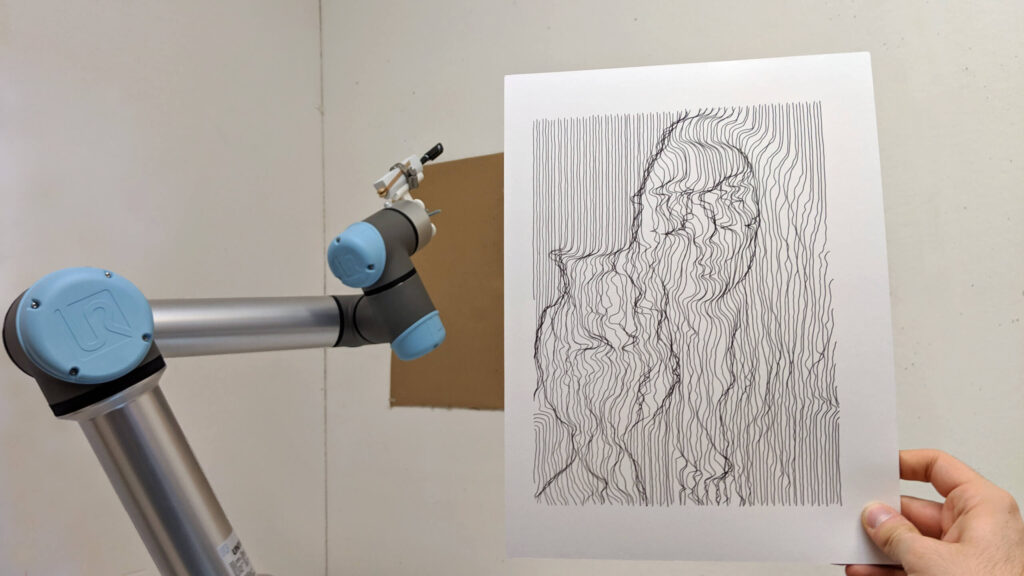
The Robotic Setup
Nicholas’s various robotic projects are based around a Universal Robots UR 5e collaborative robot and a custom-designed drawing tool. The robot programming setup is based around RoboDK.
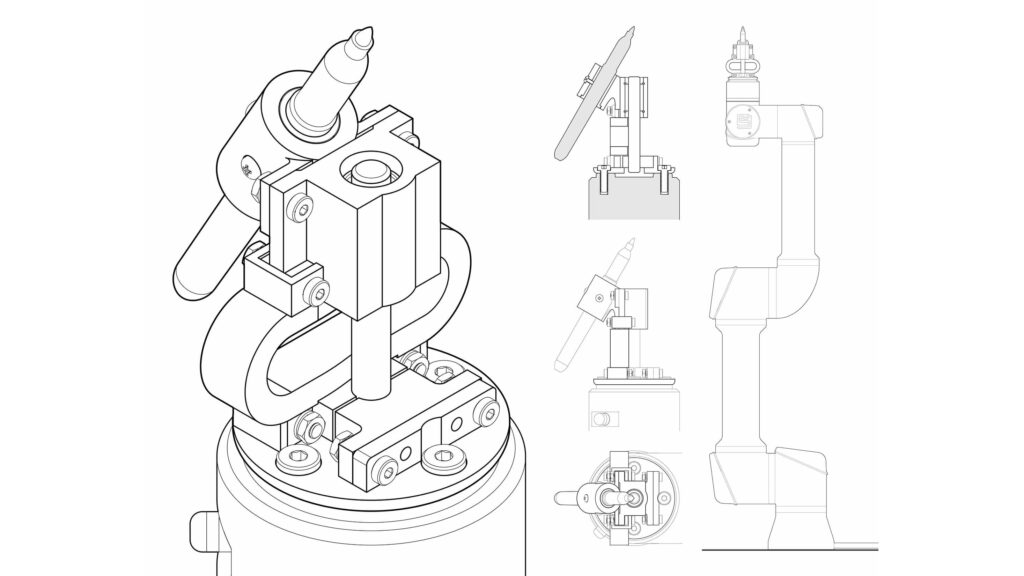
The Custom Drawing Tool
For the “business end” of the robot, Nicholas needed to connect the robot’s wrist to the brush or pen. He went through various designs until he arrived at a tool that provided the perfect trade-off of flexibility and rigidity required for the artistic tasks.
The tool is 3D printed with clear and elastic resin. It utilizes a linear sleeve bearing to provide slight flexibility to the tool.
How He Used RoboDK
Programming was achieved through a combination of RoboDK, the Rhinoceros 3D CAD package, and the robots teach pendant.
By using RoboDK’s native plugin for Rhino, he was able to easily send trajectories directly to the robot from the CAD file. Rhino is popular among designers, architects, and artists for its flexibility in 2D drafting and modeling complex shapes.
Nicholas explains:
“RoboDK was essential in bridging the gap between Rhinoceros and the Universal Robot. We’re able to directly connect to the robot and precisely align to our various work surfaces. RoboDK allows us to quickly prototype and simulate designs when working remotely. It’s been invaluable during the pandemic to test our ideas before trying them in person.”
3 of Nicholas’s Projects that Explore Robotic Drawing
Here are the 3 projects that Nicholas has used with his robotic setup so far:
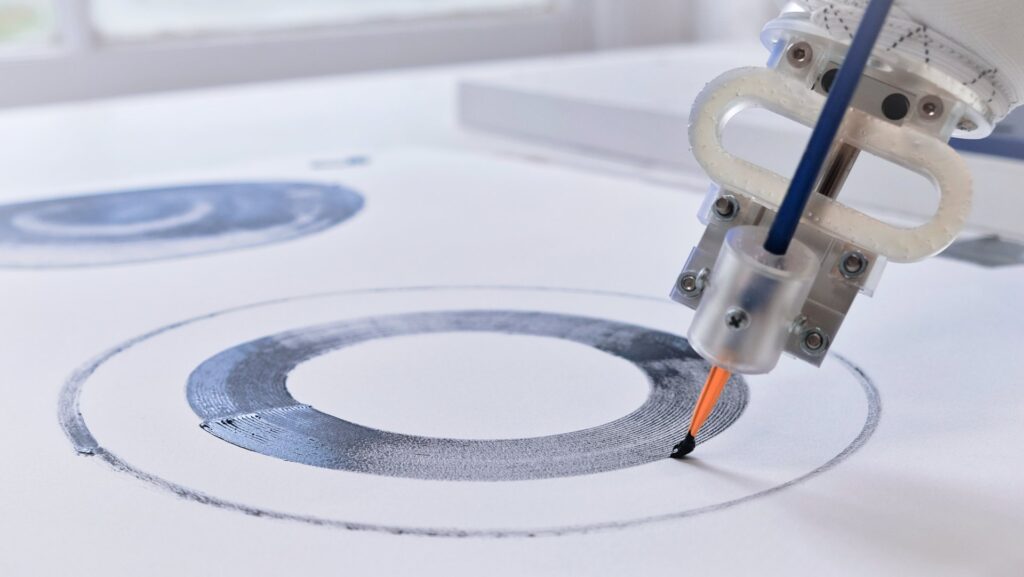
1. Robotic Painting
Here, Nicholas sought to explore how the same robot program could produce vastly different artworks simply by changing the variable of the type of paintbrush that was used.
The robot was also instructed to dip the paintbrush into the paint at different points throughout the painting process. This simple change also produced very different paintings despite the robot movements remaining consistent.
2. Generative Drawing
The final application shares some similarities with the robotic portraiture project that we reported on in 2016 as it involves turning people’s faces into robot drawings.
Nicholas used Grasshopper (the visual programming language in Rhino 3D) to convert images of people’s faces into vector drawings. Then, he reimagined these images and used the robot to draw the resulting artwork onto paper.
3. Non-Planar Notation
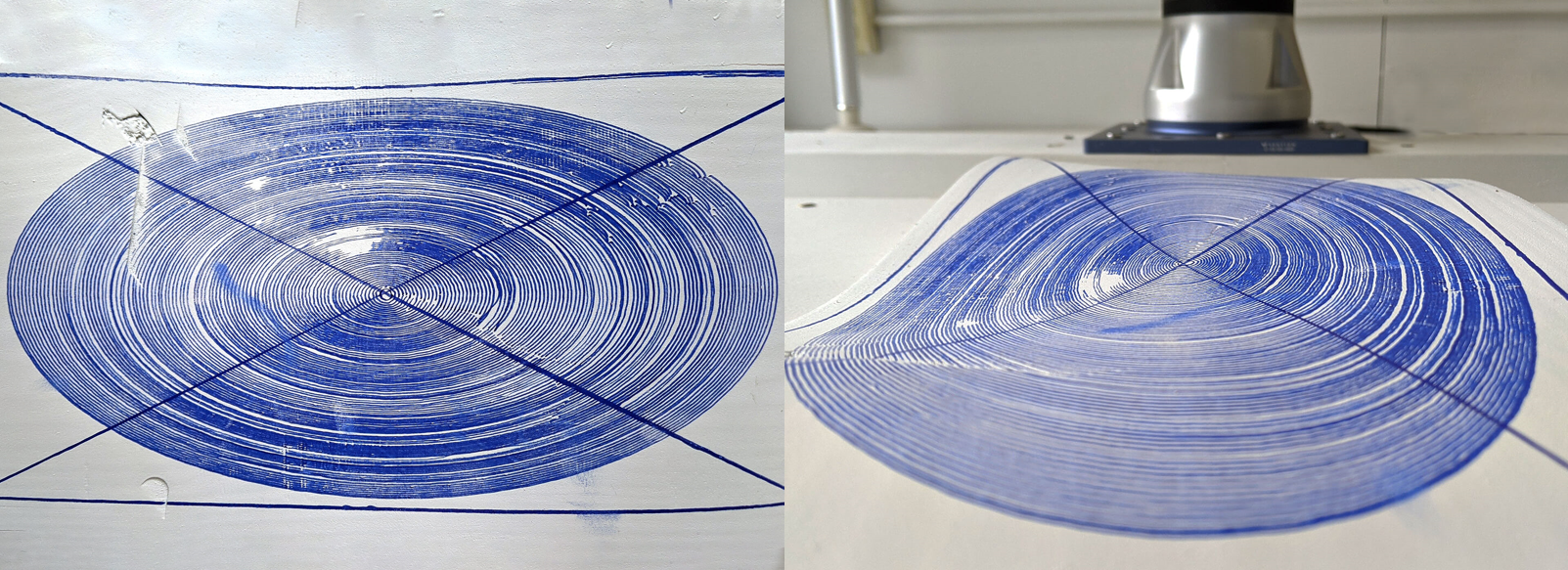
One benefit of using RoboDK is that it gives you access to advanced programming options without requiring you to calculate your own complex algebra and code your own algorithms.
In this project, Nicholas explored the possibilities of using the robot to create artwork directly on curved surfaces, such as a pipe. He used a 3D scanner to digitize the surface into a CAD model then imported this into RoboDK for programming.
What Could You Learn from Robotic Artwork?
If you are an artist yourself, projects like Nicholas’ show some of the immense possibilities that you can access by using a robot and RoboDK.
But, even if you are using robots for more conventional applications, you can still learn something from projects like these.
Artistic projects challenge us to reconsider what is possible with a robot.
For example, just think about what unique touches you could add to your products simply by questioning what more you could do with the robot’s tool!
What do you think of robot art? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.



