
You have decided that a FANUC robot is the best choice for your chosen application.
But, what’s the best way to program a FANUC?
Do you have any real choice or do you need to use the default option provided by the manufacturer?
With their distinctive bright-yellow robots, Japanese robot manufacturer FANUC is a popular choice for people looking to add robotic automation to their business.
You want to ensure that you get the most from your chosen robot… and that means picking the best programming method.
Why the Default Way to Program a FANUC is Restrictive
You might assume that you are required to use the default programming method provided by FANUC. This is a common assumption; it is certainly true that many people use the default method to program their FANUC robots.
There are 2 default methods of programming with a FANUC robot.
These are:
- TP — This is the language used by FANUC teach pendants. They are editable by the teach pendant and stored as a binary file.
- Karel — This is a Pascal-derived programming language (as many industrial robot languages are). This can be used to program the robot using a text editor.
If you or someone on your team has Karel programming experience, or if you have experience using FANUC teach pendants, these programming methods might be a viable option for you.
However, the default methods of programming robots are often much harder to use than they should be. They also miss the powerful functionality that comes with other programming methods.
You could be missing more intuitive, powerful programming if you just opt for the default option.
5 Expert Ways to Program a FANUC Robot
The best way to program a robot is one that uses your existing skills to their fullest extent. One that also allows you to access all the capabilities that you need from the robot.
Here are 5 great ways that you can program your FANUC robot; ways that make the best use of your skills and the abilities of the robot:
1. With the Teach Pendant
Of course, the default way of programming a robot is used extensively by experts in FANUC programming. The teach pendant that comes with the robot will allow you to access many aspects of its core functionality.
Teach pendant programming involves a lot of work; button pressing, navigating menus, and nudging the robot towards the desired position by eye (a technique known as “jogging”). Creating a program of any reasonable size and complexity is a long process. It’s a similarly painstaking process to make changes to the program later.
Teach pendant programming can be powerful in the right hands. However, the major problem is that it is an online programming method that takes a long time. This means that the robot needs to be taken out of action to reprogram it, which degrades its productivity.
2. With Text-based Offline Programming
You can reduce the negative effects of online programming by instead using offline programming with your FANUC robot. This means that you create the program on a computer. You can then download it to the robot’s controller when it is finished.
The most rudimentary form of offline programming is to code the program in a text editor; using FANUC’s Karel programming language. However, this requires you to have a lot of experience programming FANUC robots. It lacks any way for you to debug the program as you go. As a result, the debugging phase on the physical robot will be longer and cause similar delays to online programming.
3. With Graphical Offline Programming
A better way to program your FANUC robot offline is to use dedicated offline programming software. This allows you to create and debug the robot’s program. You can do this using a graphical simulator before you ever need to take the robot out of production.
Of course, some offline programming tools are easier to use than others. For example, RoboDK is an offline programming and simulation software that anyone can use, even without robotics experience.
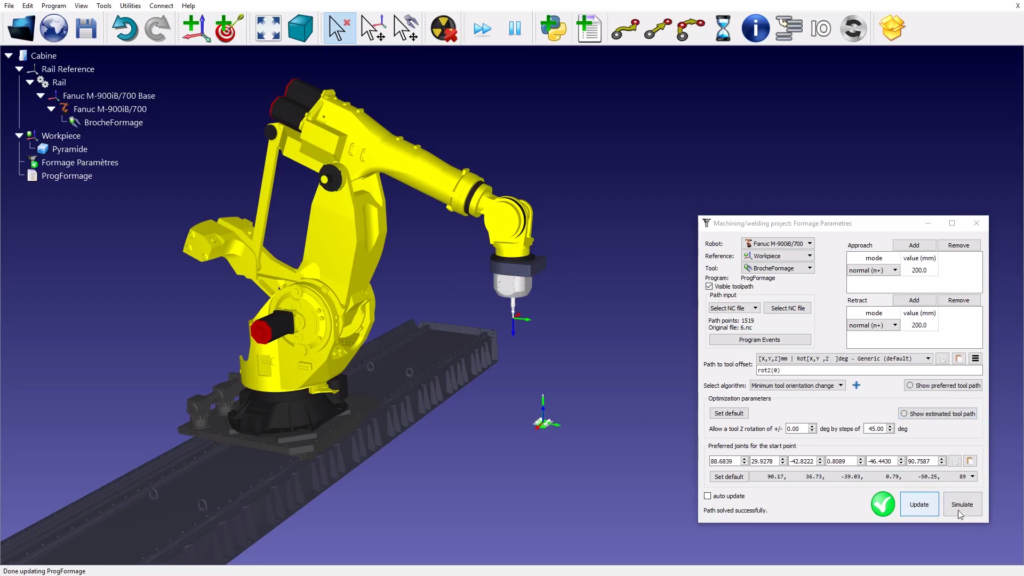
RoboDK provides an intuitive graphical interface and brings extra capabilities to your robot programming. These are not available with conventional methods such as; dedicated machining wizard, 3D printing capability, and much more.
4. With Your Favorite Programming Language
If you are an experienced programmer but you don’t have much specific experience with FANUCs or robotics, you might wonder if you can program your robot using your favorite language.
In the past, this would have been difficult as it would have involved creating wrapper libraries and possibly network communication libraries to interface with the robot’s controller. But, now it is both possible and easy.
With RoboDK, you can use any one of several high-level programming languages to program your FANUC. You can test the program offline in the simulator before you download it to the robot.
5. With a Handheld Probe
All four of the previous methods involve at least some understanding of geometry and robot programming. Even with graphical offline software, where you can drag the robot around in the graphical simulation. You still need to think about how the simulated environment relates to the real-world environment.
With all of that being said, there is one more expert way to program a FANUC robot that is even easier to use than all the rest.
With RoboDK TwinTrack, you can create the program simply by tracing the desired motion of the robot using a handheld probe. The robot then replays that exact motion. TwinTrack is also compatible with offline programming so it does not need to impact the robot’s production.
What’s the Best Way to Program Your FANUC Robot?
So, which of these programming methods will be best for you?
As mentioned, the best programming method is one that makes the best use of your existing skills as a programmer and allows you to access the most capabilities of the robot.
Sure, the default method that comes with FANUC robots might meet these criteria.
With the other options listed in this article, you can access more powerful functionality more easily. You don’t need to endlessly press buttons on the robot’s teach pendant or tie yourself in knots with the Karel programming language.
If you’d like to try programming your FANUC with RoboDK, you can get a trial version for free on the RoboDK download page.
For more instructions on how to program a FANUC robot with RoboDK, check out our dedicated documentation page.
What struggles do you have programming FANUC robots? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.




thanks for the update looking forward to next publish