
Welding tasks are a great candidate for robotic automation.
But, you might be wondering if spot welding is really the best robotics application for you and your business.
Your current spot welding operation is probably working okay. You have skilled welders who are capable of producing quality welds at reasonably high consistency.
Even so, you want to know the possibilities of robotic automation. Could a robot help you to reduce your defects and reworks?
You are probably aware that there are many benefits using robotic automation. A welding robot can help to reduce your cycle times, cut the costs of your welding operations, and achieve a more consistent throughput.
But, one of the greatest benefits of a spot welding robot is that it consistently improves the quality of the weld in a way that no skilled welder can ever hope to match.
There are several common welding defects that can be eliminated by using a robot for spot welding.
Common Spot Welding Defects and Problems
Welding technicians are professionals with specific skills. Welding is a difficult task and it can take years to reach a high level of competency as a welder.
However, even the most experienced welder will produce defects sometimes. This is only natural.

Common defects that can occur with spot welding include:
- Splattering of welded material caused by loose metal that was burned by the heat of the welder.
- Indentations or cracks in the metal.
- Asymmetrical spot weld marks.
Many people just accept that welding defects will always be a part of the manufacturing process. With manual welding, there will always be that human factor that adds an element of unpredictability.
Sure, we think, we can improve the consistency of other operations in our process. We can employ CNC machines for precise machining tasks and 3D printers for precise additive manufacturing. However, we assume that welding will always remain more of an art than a science.
But, spot welding can be improved just like any other operation.
How Robotics Helps Bring Automation to Spot Welding
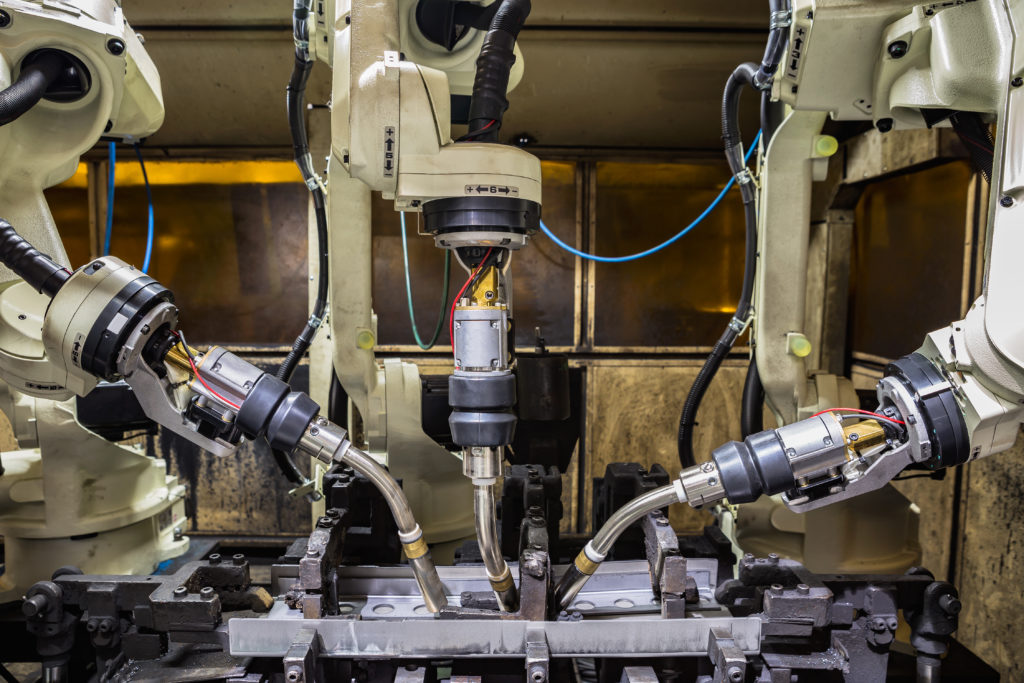
As you are likely aware, spot welding is a form of resistance welding that involves two copper electrodes. These electrodes are clamped onto the two pieces of metal that need to be joined together. Then, a current passes through the electrodes to melt the metal together.
Robotic spot welding involves exactly the same process. You will need a special spot welding tool at the wrist of the robot as an end effector.
The shape of the spot welding tool is a two-fingered clamp, with one electrode on each tip.
Robots are uniquely capable of spot welding in a way that would be almost impossible with other forms of automation. Their dexterity allows them to reach the workpiece from any orientation, which is necessary to orient the tool to the exact location.
Spot welding robots are common in the automotive industry, for example to weld the chassis of cars.
5 Welding Problems That a Robot Can Eliminate
There are various problems that can occur with manual spot welding. You will not be able to completely eliminate all of them with a robot. However, there are a few that you can eliminate when you move to robotic spot welding.
Here are 5 examples of welding problems that a robot can often eliminate:
- Insufficient force — You must apply enough force to the workpiece. If not, the weld will not be strong enough.
- Excessive force — Too much force on the workpiece can cause sticking and splashing, resulting in a bad quality weld.
- Insufficient squeeze time — The workpiece must be squeezed for enough time for the material to melt, otherwise the weld will not be of sufficient strength.
- Insufficient hold time — After the squeeze time, the electrode must be held in position while the weld solidifies before it is released. Otherwise, the weld may move and cause a defect.
- Insufficient edge distance — If the weld is held too close to the edge of the workpiece, the flash can escape and jeopardize the quality of the weld.
All of these problems can occur with manual welding. Even if the welder achieves a quality weld most of the time, slight variations in their grasp on the tool or positioning of the electrodes can lead to a defect or inconsistent weld.

What Makes Robotic Spot Welding More Consistent
There are several factors that contribute to the higher consistency of robotic spot welds when compared to manual welding.
These factors include:
Precise positioning — The robot will always create the welding spots in exactly the same location. This helps to avoid issues like asymmetrical weld marks. Also, the welds on every workpiece will be consistent.
Consistent weld time — Inconsistencies in welding marks are often caused by the different lengths of time that the welding tool is held onto the workpiece. A robot will always maintain the same weld time.
Consistent welding force — Another cause of inconsistency is the force with which the tool is held to the workpiece. Spot welding end effectors are designed to provide a consistent force with the electrodes aligned in perfect parallel alignment.
Precise electrical current/energy — The current flowing across the electrodes will have a large effect on the quality of the weld. You can set it manually in many spot welding machines and your robot can control it precisely.
All these factors combine to mean that a spot welding robot will be more consistent than a human welder.
Start Programming Your Spot Welding Robot Today
If you think that robotic spot welding might be a good application for your business, you can get started right away.
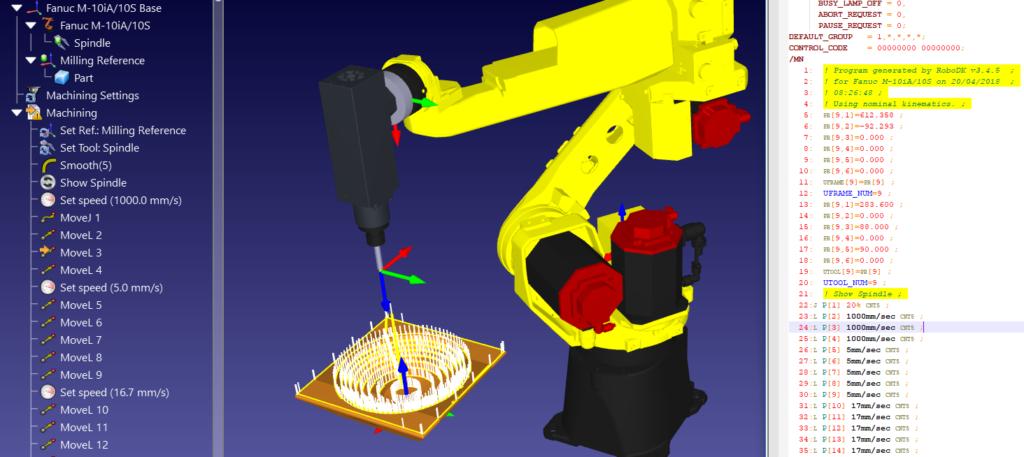
With RoboDK you can create and program your welding task before you have even purchased the robot and spot welding tool. You can test out the application and decide exactly how you will integrate it into your operations.
For more information, read our guide The Simple Way to Flawless Robot Welding or check out our spot welding example.
What spot welding defects would you like to eliminate? Tell us in the comments below or join the discussion on LinkedIn, Twitter, Facebook, Instagram, or in the RoboDK Forum.



really great blog about Spot Welding Robots Can Eliminate These Common Defects .Thanks for sharing !