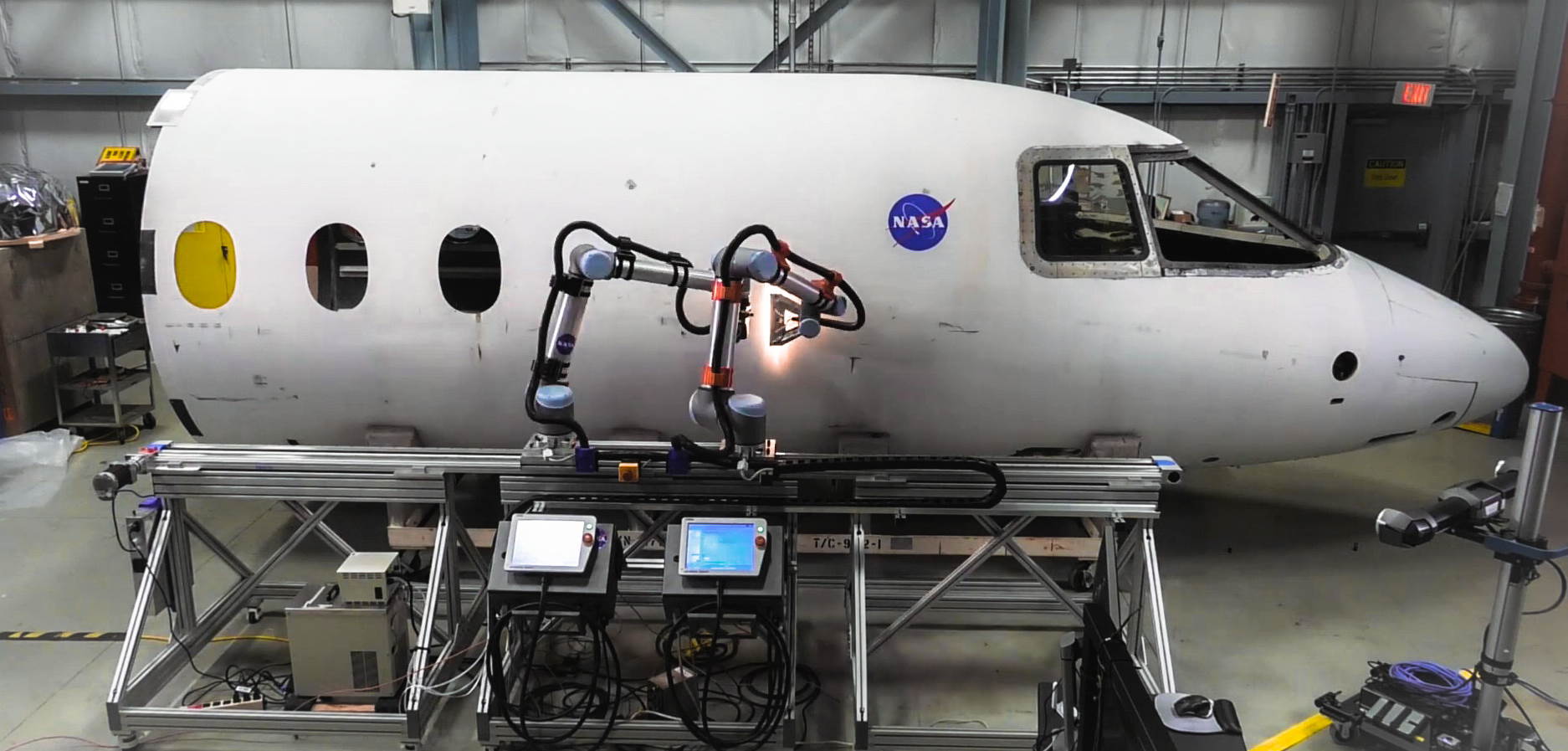
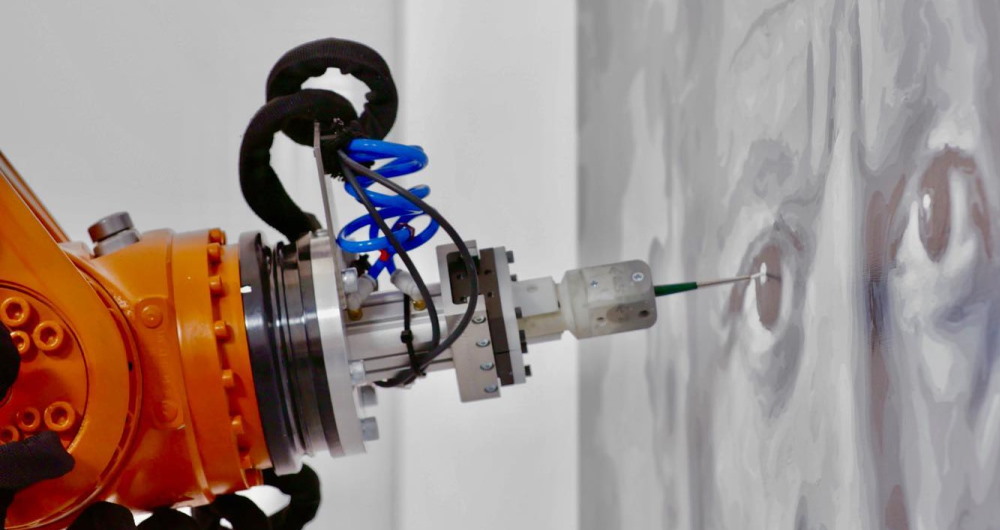
En 2017, une équipe du Langley Research Center de la NASA, en Virginie (États-Unis), a été chargée de développer un système d'inspection automatisé pour les fuselages d'avions en matériaux composites.
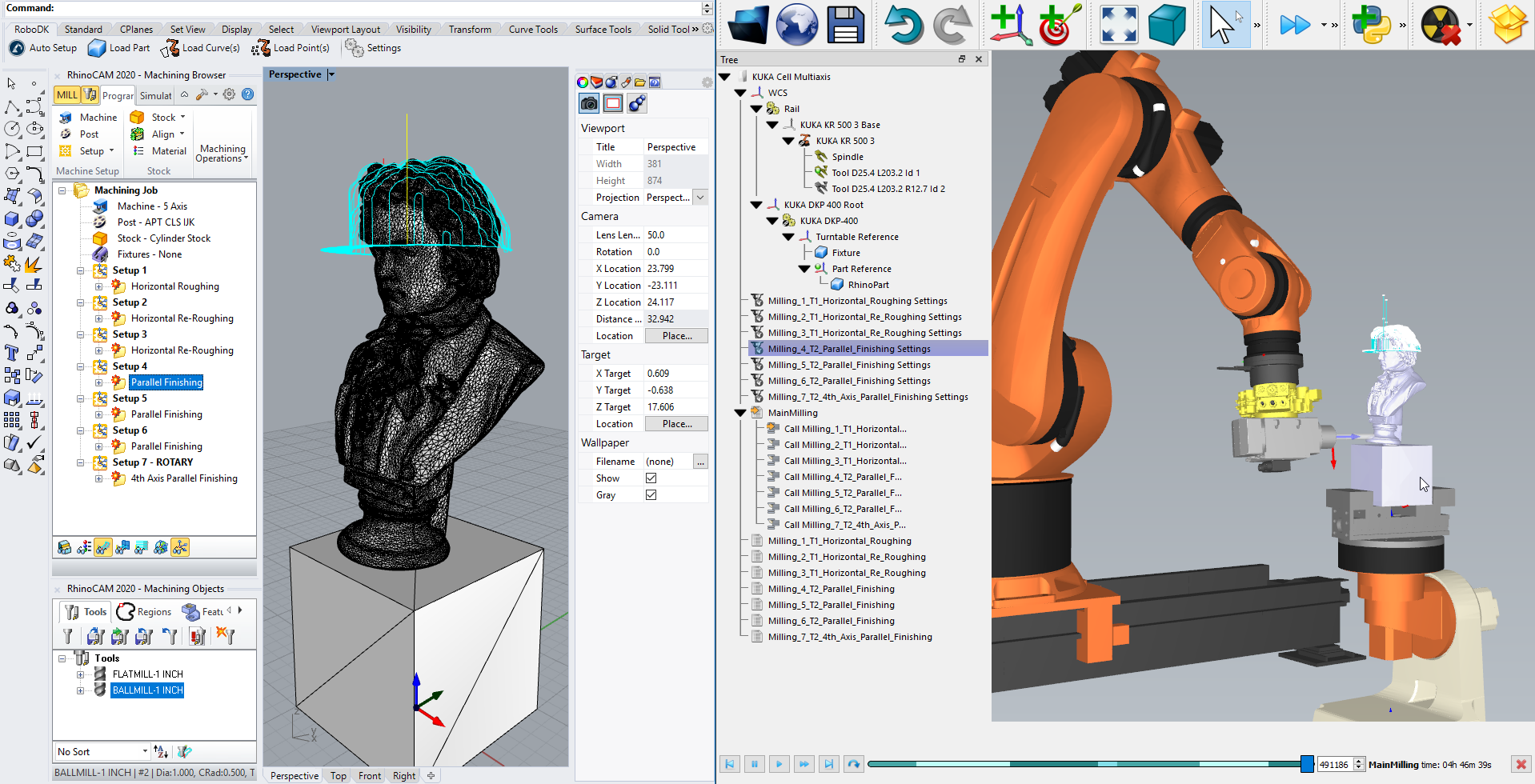
Les chercheurs ont opté pour une solution basée sur un cobot utilisant un UR10 d'Universal Robots et le logiciel RoboDK pour la simulation et la programmation hors ligne.
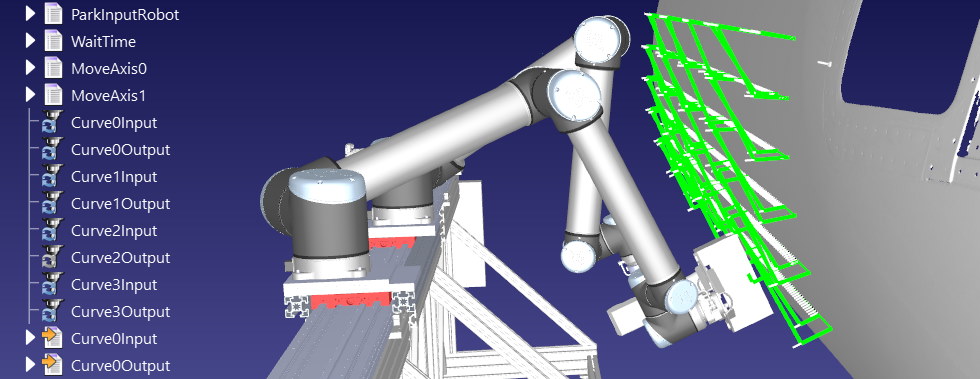
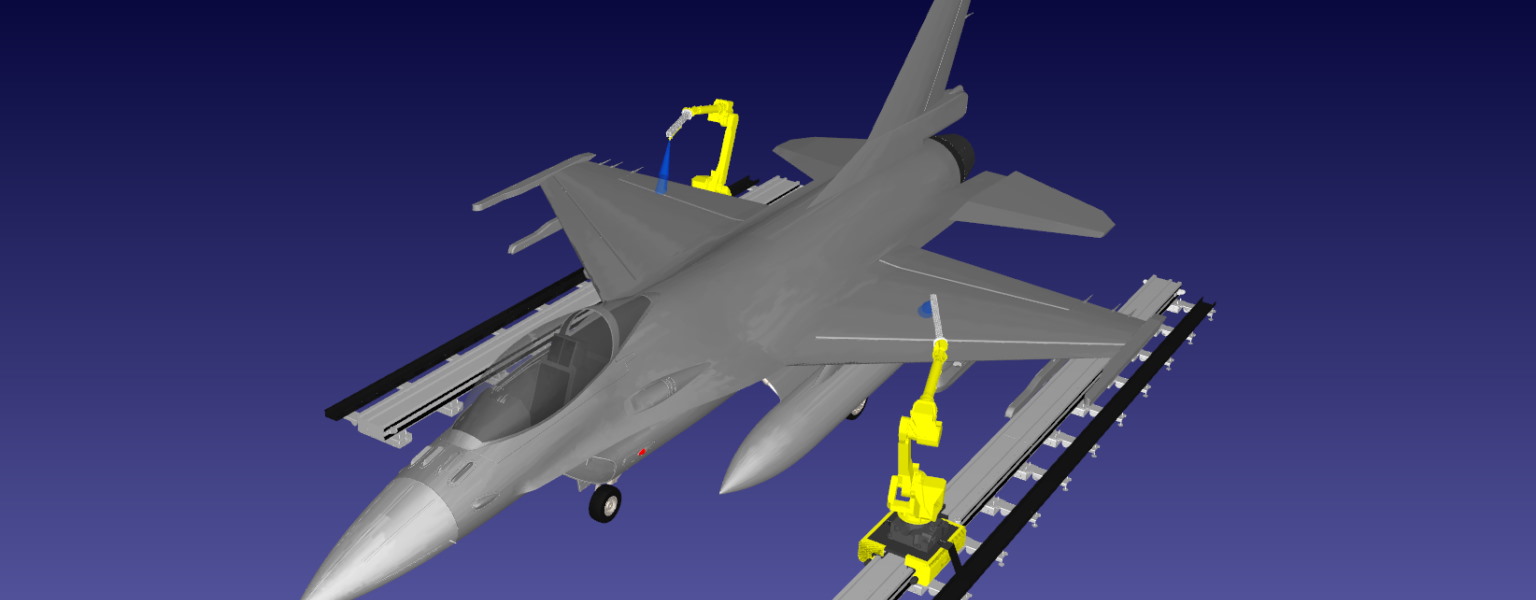
En 2019, s'appuyant sur le succès du projet initial, la NASA a dévoilé un nouveau projet d'étude de l'environnement. système d'inspection multi-robots qui utilise deux cobots synchronisés pour effectuer des inspections par tomographie linéaire sur des fuselages d'avions.
Conçu pour faciliter les flux de travail multi-logiciels, le logiciel RoboDK a permis aux chercheurs de synchroniser 2 robots et d'incorporer des axes externes dans leurs simulations.