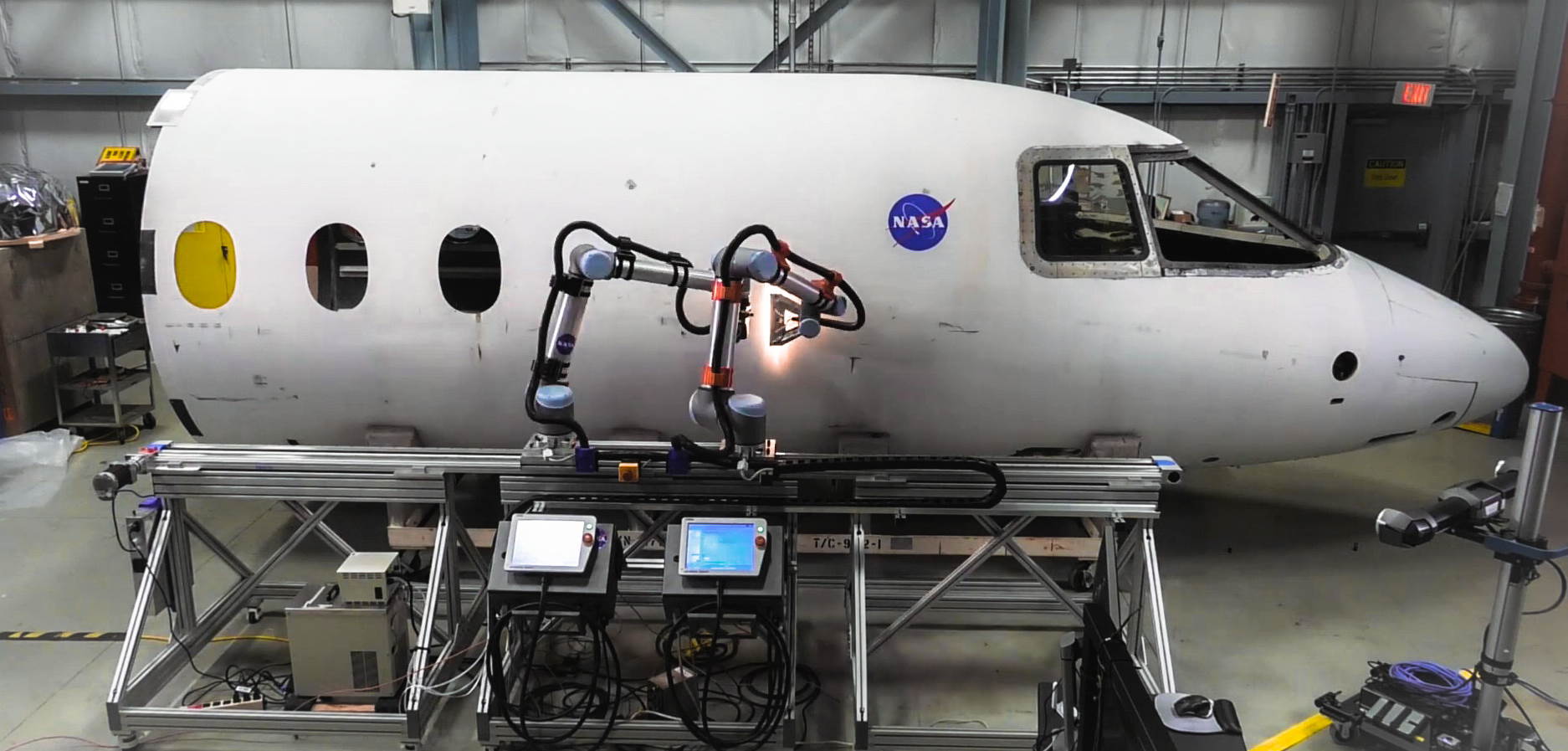
Em 2017, uma equipe do Centro de Pesquisa Langley da NASA, na Virgínia, EUA, foi encarregada de desenvolver um sistema de inspeção automatizada para fuselagens compósitas de aeronaves.
Os pesquisadores optaram por uma solução baseada em cobot usando um UR10 da Universal Robots e o software RoboDK para simulação e programação off-line.
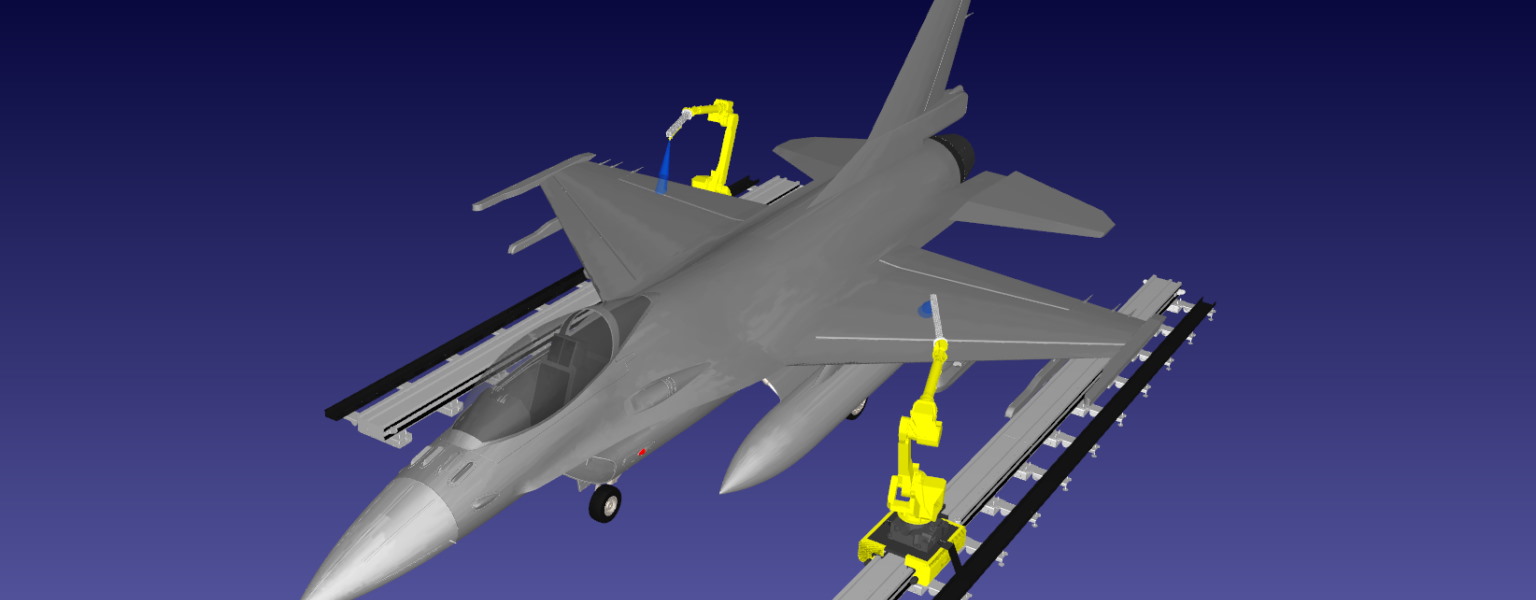
Em 2019, com base no sucesso do projeto original, a NASA revelou um sistema de inspeção com vários robôs que usa dois cobots sincronizados para realizar inspeções de tomografia por varredura de linha em fuselagens de aeronaves.
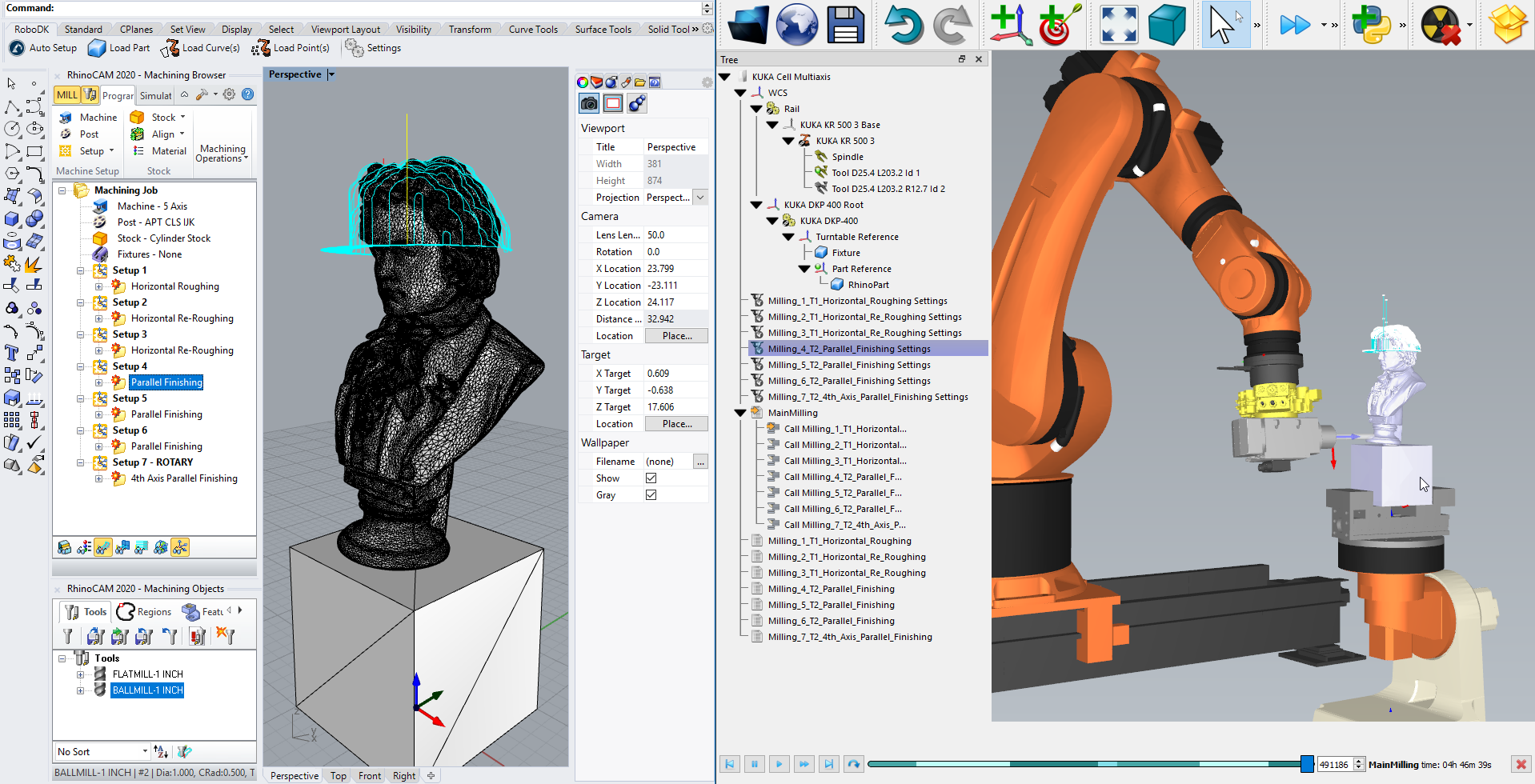
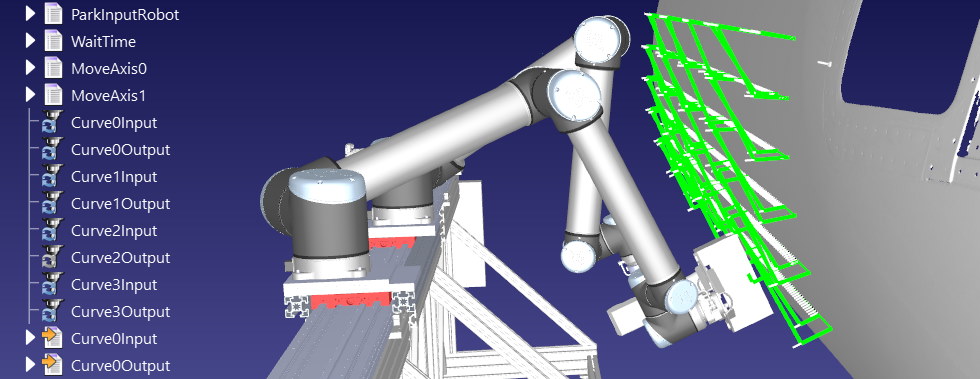
Projetado para facilitar fluxos de trabalho com vários softwares, o software RoboDK permitiu que os pesquisadores sincronizassem dois robôs e incorporassem eixos externos em suas simulações.