Solução completa
Tamanho compacto, econômico e de fácil configuração
Recursos da API do RoboDK incluídos
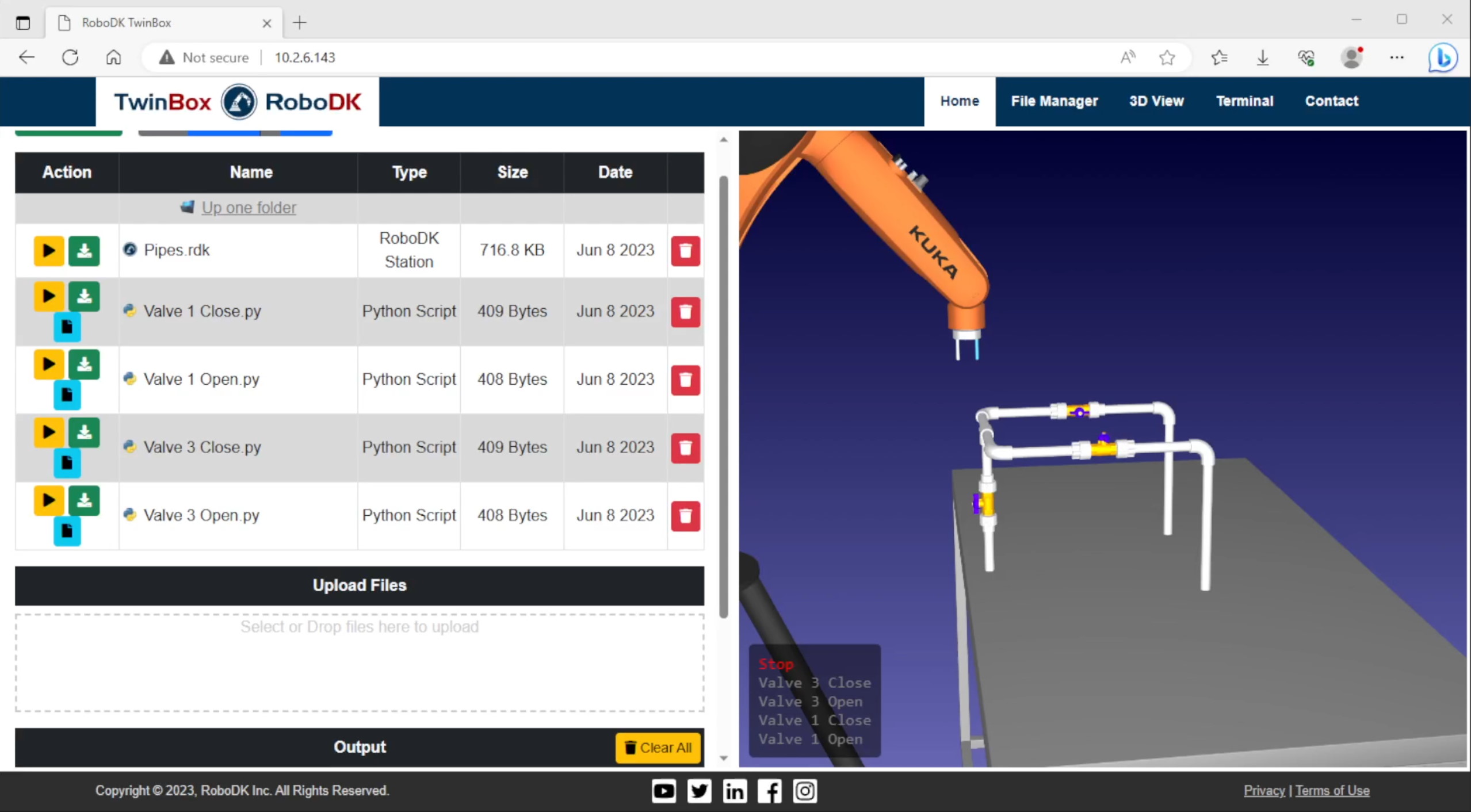
Controlado por meio de um navegador da Web
Acesso em tempo real de qualquer lugar do mundo
Controle total sobre robôs, dispositivos e sensores
Tamanho compacto, econômico e de fácil configuração
Recursos da API do RoboDK incluídos
Controlado por meio de um navegador da Web
Acesso em tempo real de qualquer lugar do mundo
Controle total sobre robôs, dispositivos e sensores
Acesso remoto por meio de um navegador da Web
Eficiente em termos de espaço: Não há necessidade de um teclado, mouse ou monitor local
Conecte dispositivos personalizados (câmeras, sensores, ...)
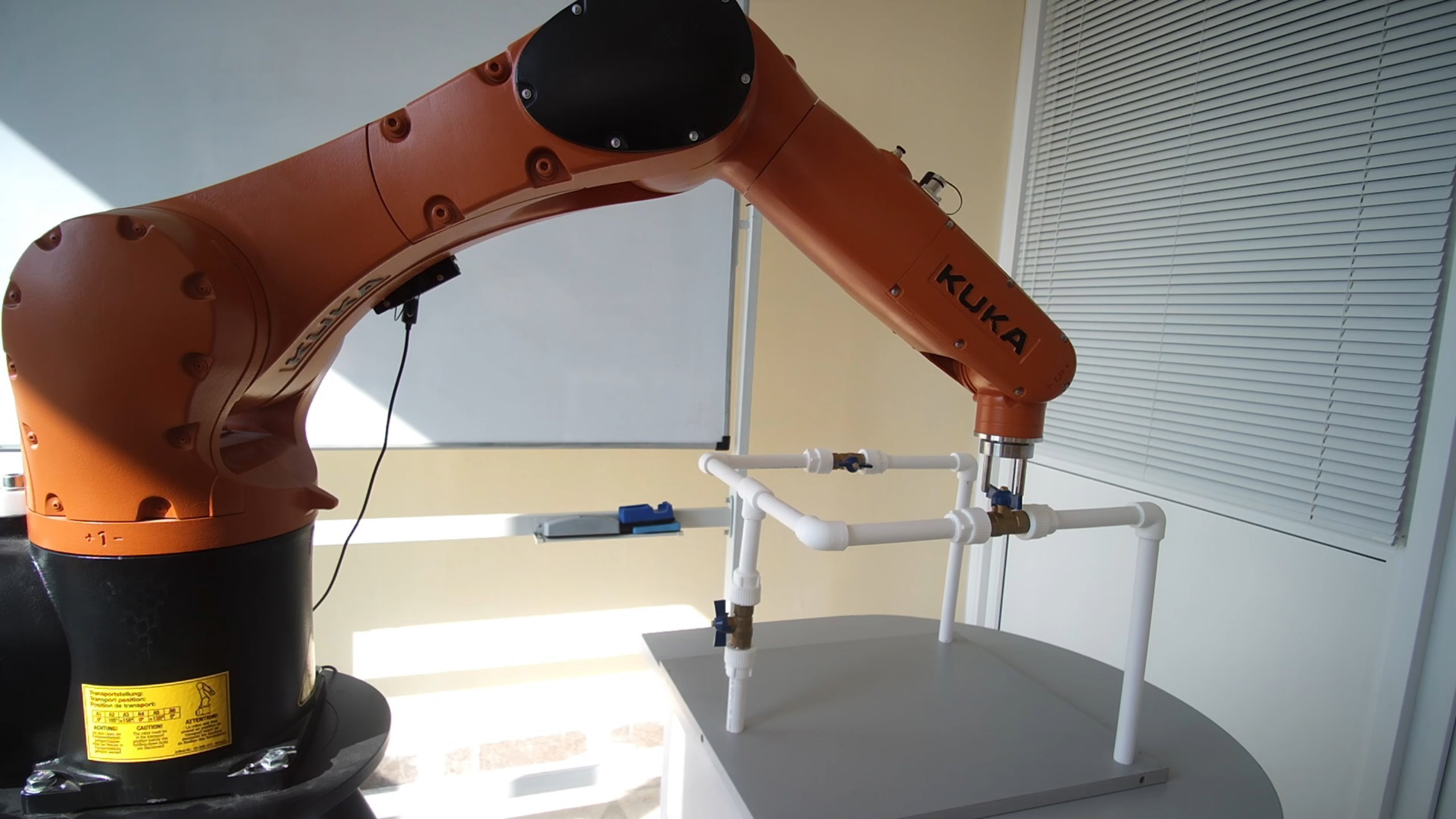
Suporte para vários robôs
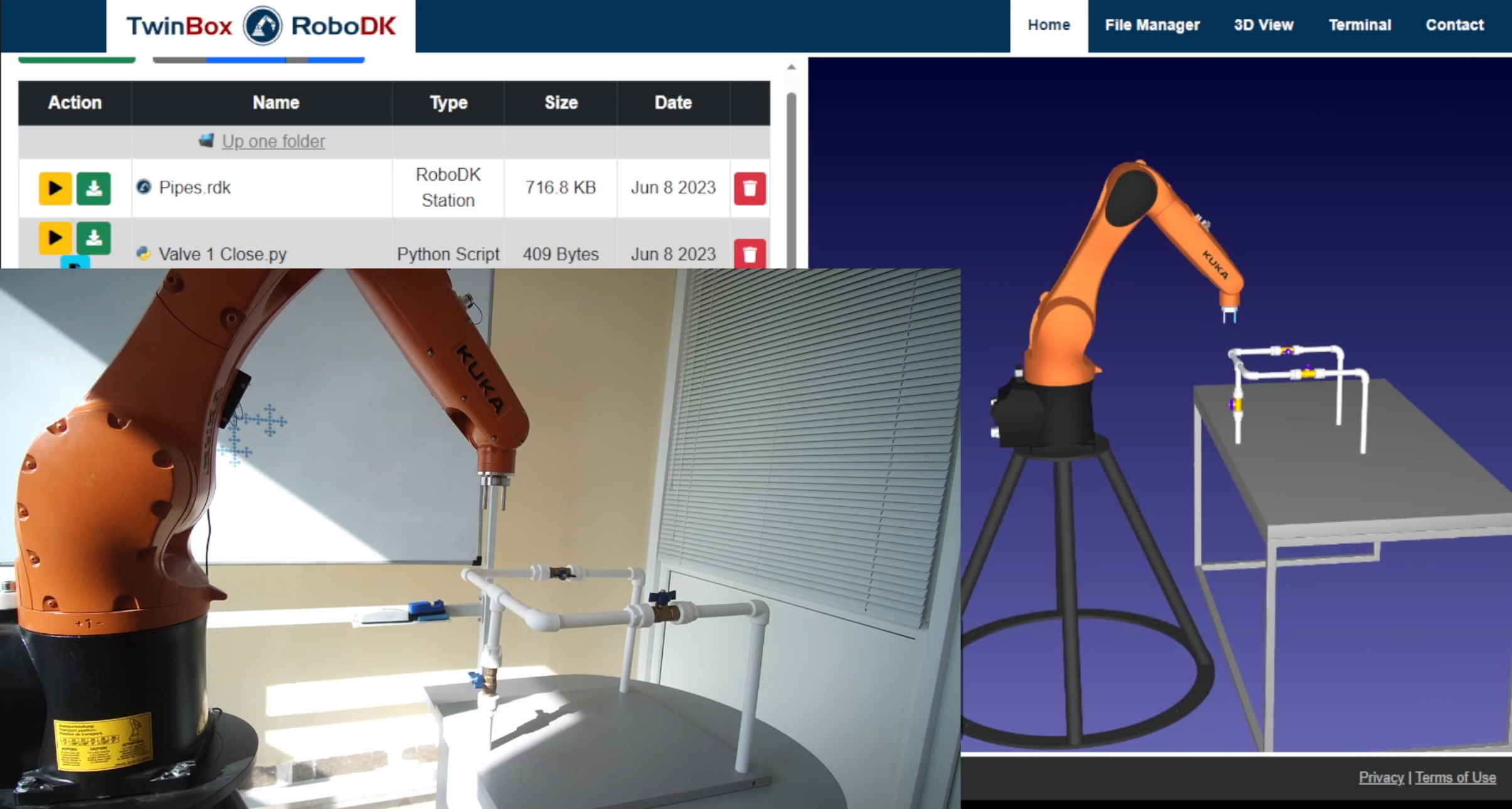
Crie seu projeto usando o RoboDK Desktop
Carregue a estação usando seu navegador
Execute o programa do robô por meio da interface da Web do RoboDK TwinBox
Ajuste o programa, se necessário
Suporte a vários sistemas operacionais: Windows, Linux Debian ou Ubuntu
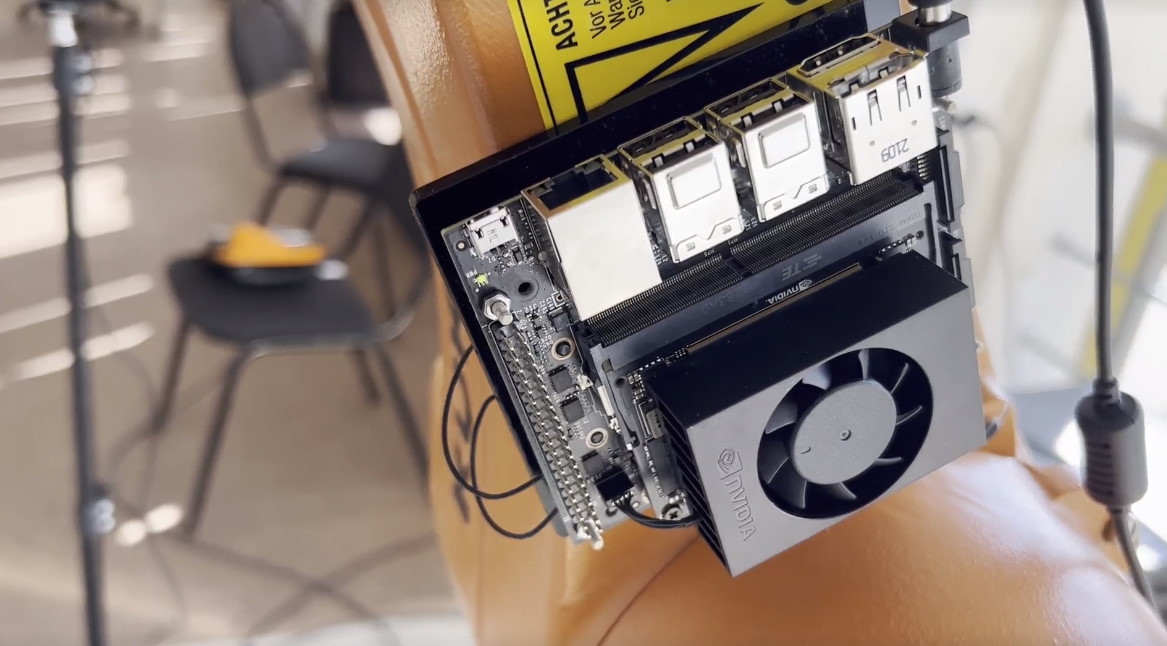
Requisitos do sistema: Plataformas Intel x86-64, ARM
Compilações dedicadas disponíveis: Nvidia Jetson, Raspberry Pi
Gere programas para seu controlador de robô com apenas alguns cliques
Modele e sincronize facilmente eixos adicionais






