Универсальное решение
Компактный размер, экономичность, простота настройки
API-функции RoboDK включены
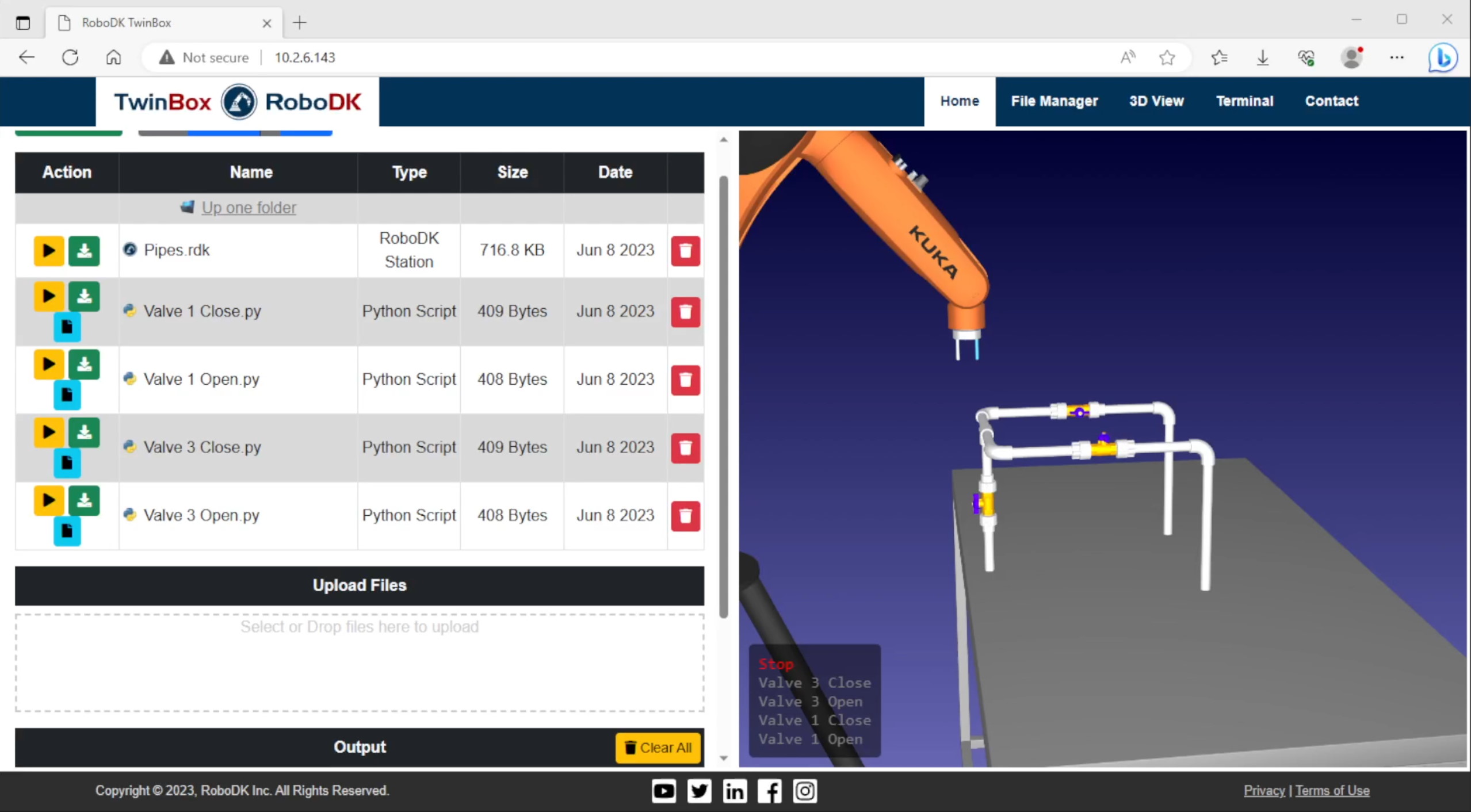
Управление через веб-браузер
Доступ в режиме реального времени из любой точки мира
Полный контроль над роботами, устройствами и датчиками
Компактный размер, экономичность, простота настройки
API-функции RoboDK включены
Управление через веб-браузер
Доступ в режиме реального времени из любой точки мира
Полный контроль над роботами, устройствами и датчиками
Удаленный доступ через веб-браузер
Экономия пространства: Нет необходимости в локальной клавиатуре, мыши или дисплее
Подключение пользовательских устройств (камер, датчиков, ...)
Поддержка нескольких роботов
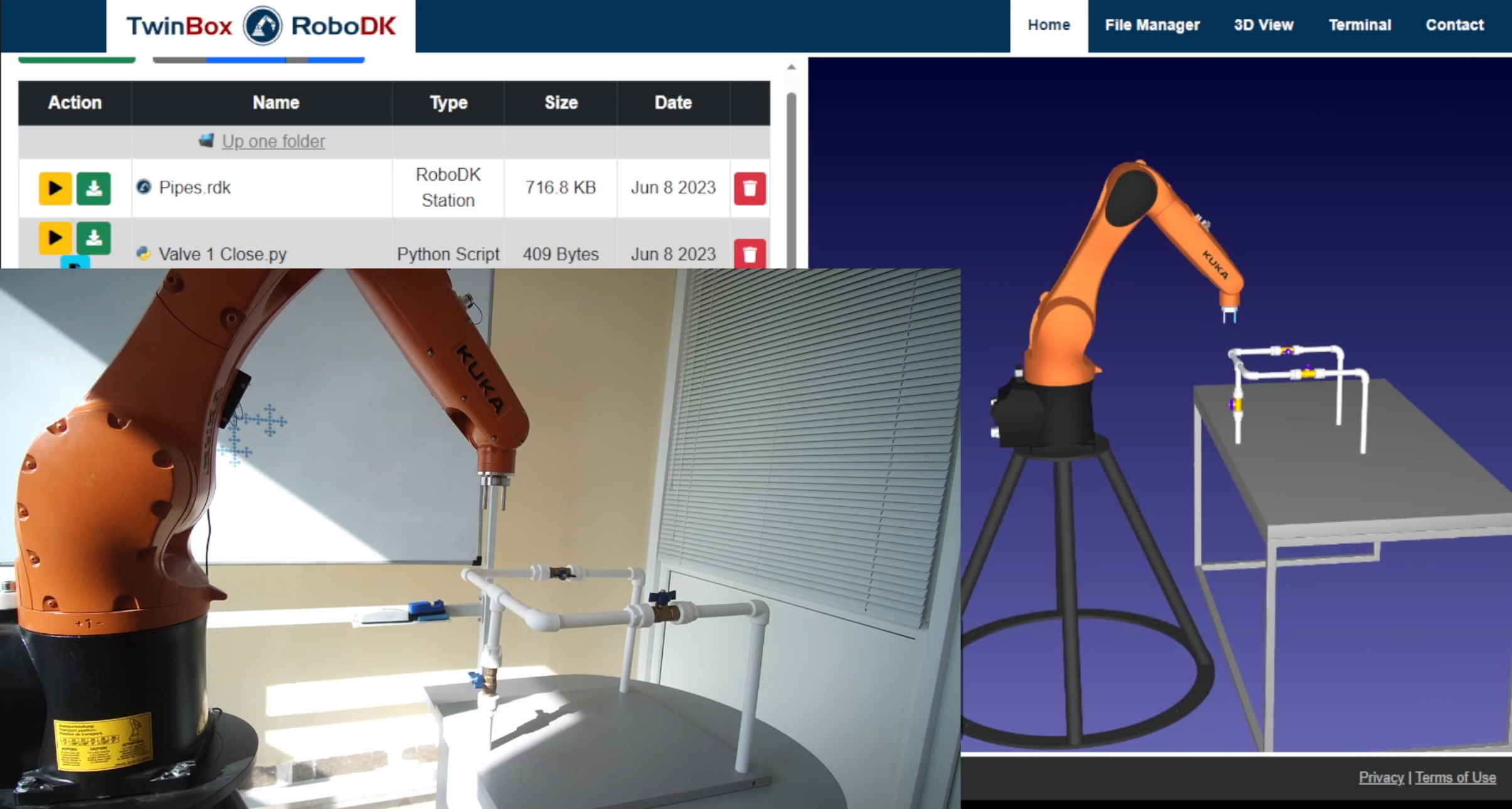
Создайте свой проект с помощью RoboDK Desktop
Загрузите станцию с помощью браузера
Выполнение программы робота через веб-интерфейс RoboDK TwinBox
При необходимости скорректируйте программу
Поддержка нескольких операционных систем: Windows, Linux Debian или Ubuntu
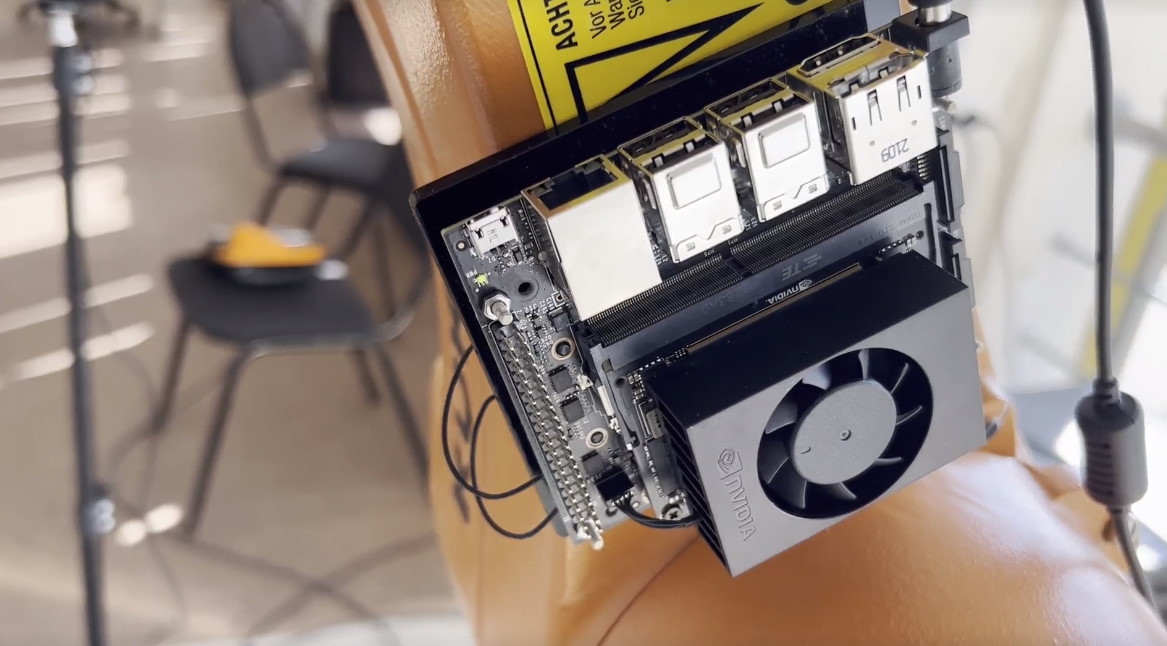
Системные требования: Платформы Intel x86-64, ARM
Доступны специализированные сборки: Nvidia Jetson, Raspberry Pi
Создавайте программы для контроллера робота всего несколькими щелчками мыши
Простое моделирование и синхронизация дополнительных осей






