올인원 솔루션
컴팩트한 크기, 비용 효율적, 간편한 설정
포함된 RoboDK API 기능
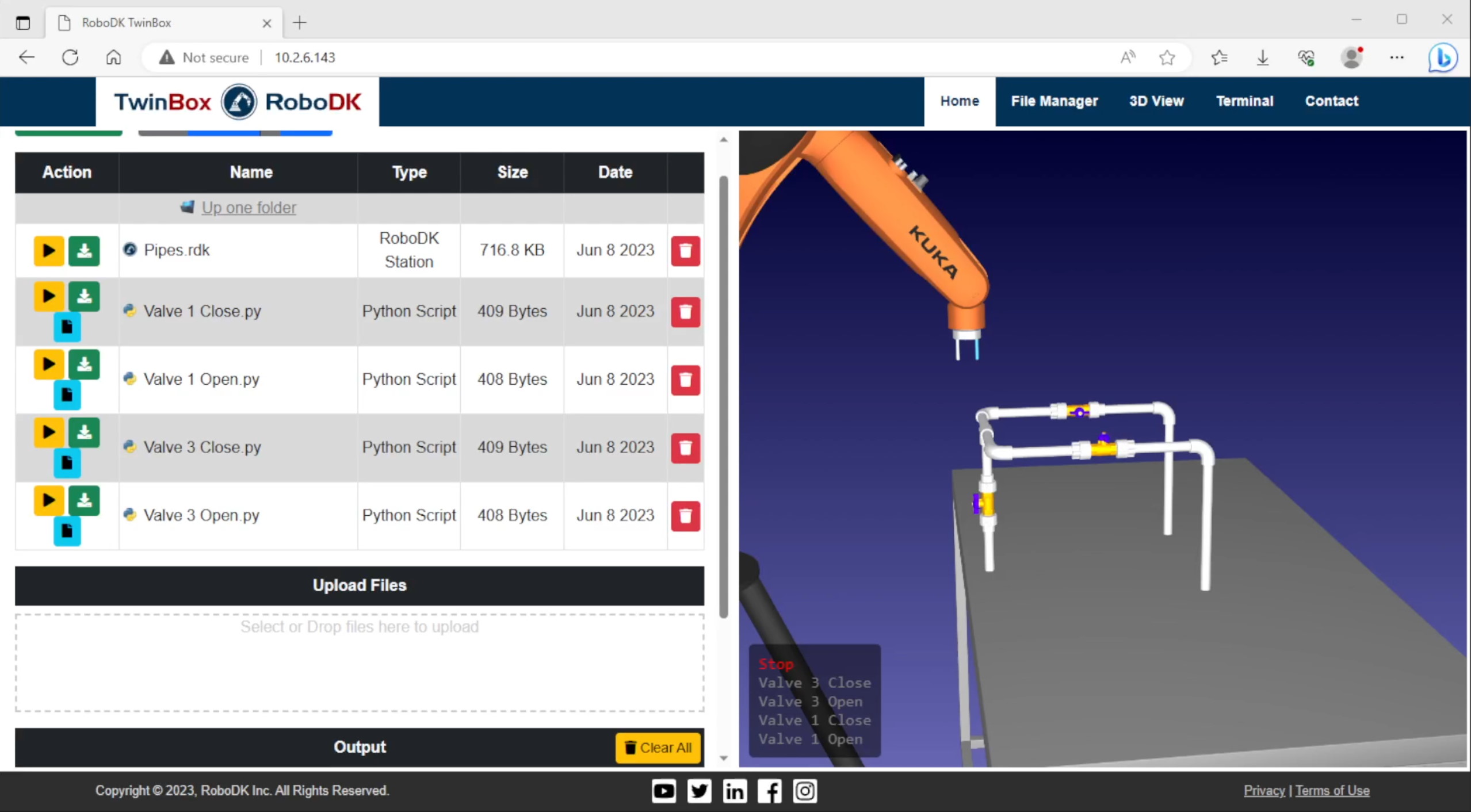
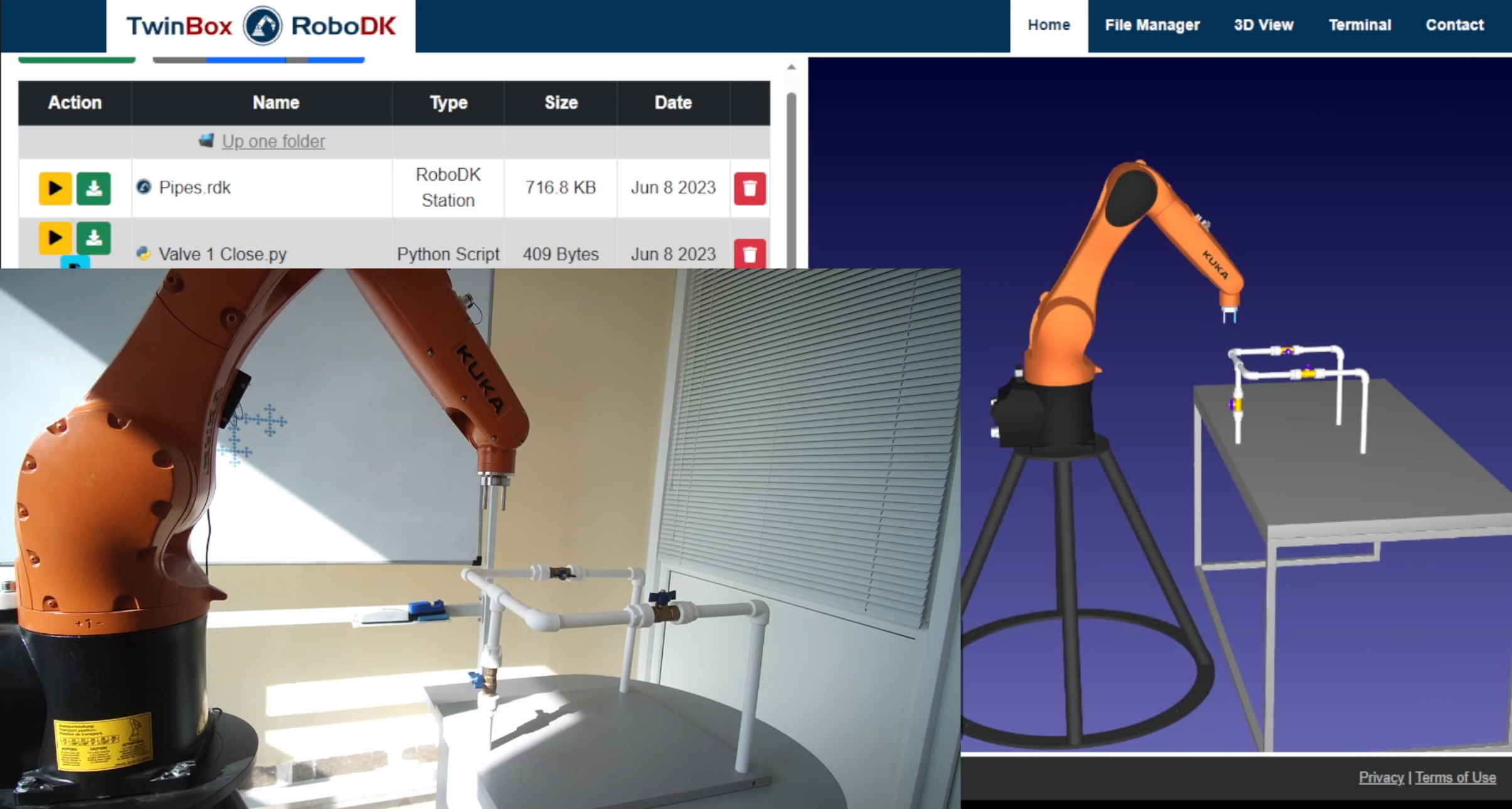
웹 브라우저를 통해 제어
전 세계 어디에서나 실시간 액세스
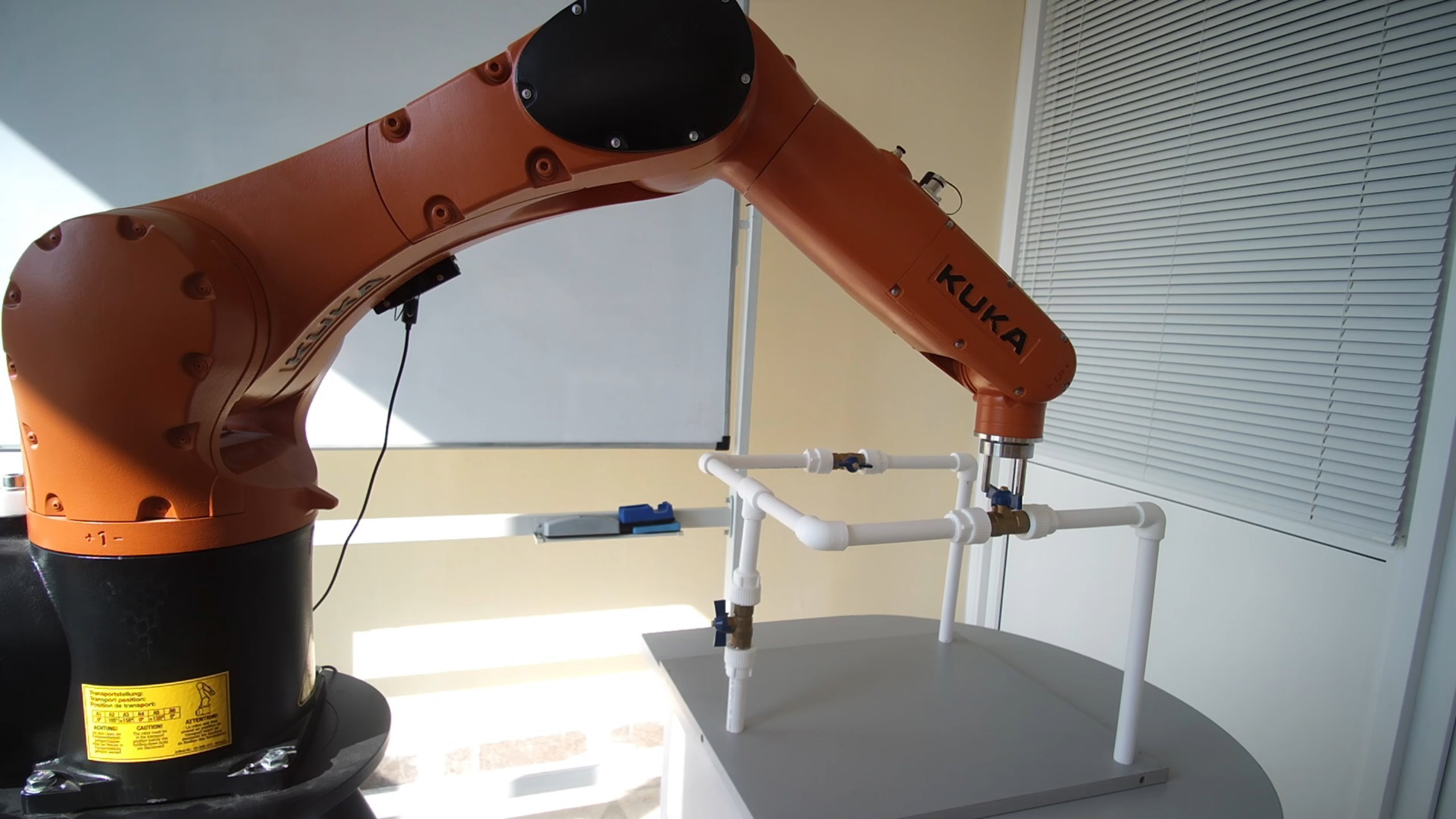
로봇, 장치 및 센서에 대한 완벽한 제어
컴팩트한 크기, 비용 효율적, 간편한 설정
포함된 RoboDK API 기능
웹 브라우저를 통해 제어
전 세계 어디에서나 실시간 액세스
로봇, 장치 및 센서에 대한 완벽한 제어
웹 브라우저를 통한 원격 액세스
공간 효율적: 로컬 키보드, 마우스, 디스플레이가 필요 없음
사용자 지정 장치 연결(카메라, 센서 등)
여러 로봇 지원
RoboDK 데스크톱을 사용하여 프로젝트 빌드하기
브라우저를 사용하여 스테이션 로드
RoboDK TwinBox 웹 인터페이스를 통해 로봇 프로그램을 실행합니다.
필요한 경우 프로그램 조정
여러 운영 체제 지원: 윈도우, 리눅스 데비안 또는 우분투
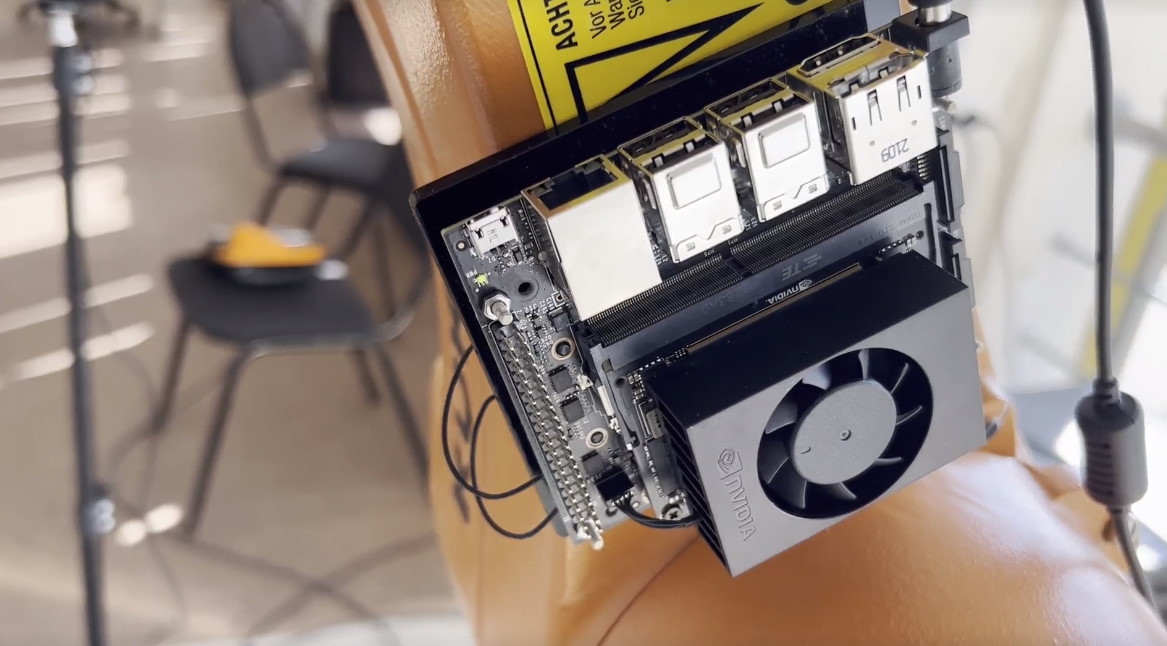
시스템 요구 사항: 인텔 x86-64 플랫폼, ARM
전용 빌드를 사용할 수 있습니다: 엔비디아 젯슨, 라즈베리 파이
몇 번의 클릭만으로 로봇 컨트롤러용 프로그램을 생성하세요.
추가 축을 쉽게 모델링하고 동기화하기






